

5.9.4. Полочные и люлечные элеваторы
Полочные и люлечные элеваторы (конвейеры) применяют для вертикального транспортирования штучных и тарно-штучных грузов.
Полочные элеваторы (рис. 5.36, а) бывают вертикальные и наклонные. Грузонесущий элемент полочных элеваторов - полки-захваты выполняются в виде кронштейнов с изогнутой или плоской формой опорной части в зависимости от конфигурации груза.
Полки-захваты к цепям крепятся жестко. Загрузка и разгрузка полок производятся автоматически или вручную. Разгружают обычно в верхней точке нисходящей ветви; возможна разгрузка и на восходящей ветви путем отклонения полки при помощи дополнительных отклоняющих звездочек.
В люлечном элеваторе (рис. 5.36, б) грузонесущим элементом являются люльки, которые к цепям крепятся шарнирно. Такое крепление позволяет цепям беспрепятственно огибать звездочки. По числу тяговых цепей люлечные элеваторы бывают двухцепные и одноцеп-ные; у последних люльки расположены консольно. Люлечные элеваторы выпускаются грузоподъемностью от 10 (модель ВПК-2) до 100 кг (модель ВПК-5) при скорости подъема 0,25 и 0,16 м/с соответственно.
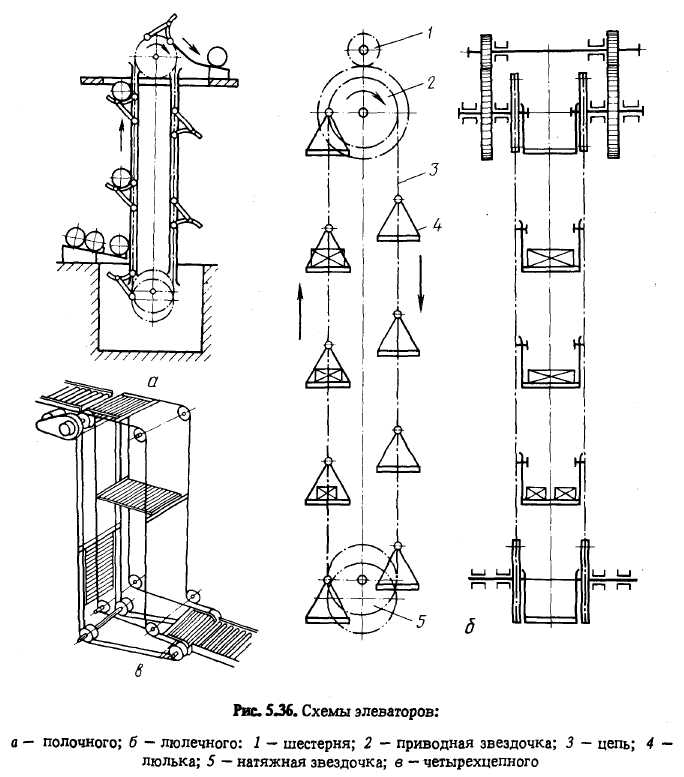
Для устранения раскачивания грузонесущего элемента элеваторы снабжены направляющими шинами. Для автоматической загрузки и разгрузки люлек применяют выдвижные и поворотные колосниковые и роликовые столы.
Тяговым элементом полочных и люлечных конвейеров служат пластинчатые втулочные и втулочно-катковые цепи (ГОСТ 588).
Натяжное устройство элеваторов - винтового или пружинно-винтового типа.
Привод в полочных и люлечных элеваторах, как правило, редук-торный с предохранительным устройством (тормоз или останов) для предотвращения движения ходовой части в обратную сторону.
Для вертикального транспортирования крупногабаритных грузов применяют четырехцепные полочные элеваторы. Четырехцепной элеватор (рис. 5.36, в) состоит из двух наружных пластинчатых, бесконечно замкнутых и двух внутренних цепей. Цепи приводятся в движение синхронно.
Полки, имеющие вид четырехугольных платформ, двумя передними углами прикреплены к внутренним цепям, а задними углами - к наружным. Полки состоят из шарнирно сочлененных балок и крепятся к цепям с помощью пальцев, входящих в отверстия втулок пластинчатых цепей. Грузоподъемность одной полки четырехцепного полочного конвейера от 75,0 до 1500 кг, скорость подъема 10...40 м/мин, размеры полок 600 х 800... 1100 х 1200 мм, высота подъема 5...30 м.
Расчет полочных и люлечных конвейеров аналогичен расчету ковшового элеватора. Производительность конвейеров определяют по формуле (5.17), причем скорость цепей принимают равной 0,2...0,3 м/с. Максимальное натяжение цепи и мощность привода предварительно находят по формулам (5.19) и (5.20). По максимальному усилию выбирают цепь, определяют диаметр звездочки и передаточное отношение. На этом предварительное определение параметров конвейера заканчивают и проводят его проверочный расчет.
При тяговом расчете за исходную точку принимают натяжение цепи в точке набегания на натяжные звездочки. Обычно Fmin = 1,0...2,0 кН.
Максимальное натяжение (Н) цепь испытывает в точке набегания на приводную звездочку:
![]()
где Fc6 — натяжение цепи в точке сбегания с натяжной звездочки, Н; WГ — сопротивление движению ходовой части на груженой (восходящей) ветви элеватора:
![]()
здесь qц— сила тяжести цепи, Н/м; nц — количество тяговых цепей, шт.; qn — сила тяжести полок (люлек); qn = Gn / а, Н/м; Н1 — протяженность прямолинейного участка трассы элеватора, м; qг — сила тяжести груза, Н/м; H — высота подъема груза, м;
Wдоп — дополнительное сопротивление, возникающее в вертикальных направляющих шинах полочных и одноцепных люлечных элеваторов вследствие консольного расположения полок (люлек):
для двухцепного элеватора
![]()
для одноцепного
![]()
где Gn
— нагрузка от одной полки (люльки)
с грузом, кг; l— расстояние
от центра тяжести груза до цепи, м; w
— коэффициент сопротивления движению
цепи по направляющим; для цепей без
катков w
= 0,15...0,20, для цепей с ходовыми
катками
![]() ;hп(л)
- расстояние между точками крепления
полки (или люльки) к цепи, м.
;hп(л)
- расстояние между точками крепления
полки (или люльки) к цепи, м.
Сила дополнительного сопротивления может быть как на груженой, так и на холостой ветви элеватора.