

8.7.4. Элементы промышленных роботов
Захватные устройства. Захватное устройство (ЗУ) обеспечивает захват и удержание в определенном положении объекта манипулирования.
По способу захвата и удержания груза ЗУ делятся на механические (рис. 8.34, а), вакуумные и пневматические (рис. 8.34, б, в, г), электромагнитные (рис. 8.34, д). Как правило, ПР комплектуют набором типовых ЗУ, которые можно менять в зависимости от характера выполняемой работы.
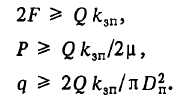
Расчет механических захватных устройств (рис. 8.34, о) - скоростей, ускорений и времени выполнения основных движений начинают, как правило, с оценки усилия, необходимого для зажатия объекта манипулирования:
![]()
где β — коэффициент запаса сцепления, β = 1,25...1,5; т - масса объекта манипулирования, кг; amax + g = сумма максимального ускорения в вертикальной плоскости и ускорения свободного падения, м/с2.
При расчете вакуумных захватов (рис. 8.34, б, в, г) сила вакуумного притяжения
![]()
где кр — коэффициент, учитывающий возможное изменение атмосферного давления и свойств уплотнения, kр = 0,85; А — эффективная площадь действия захватного устройства, м2; А = (0,6...0,7)AH (AH — площадь поверхности; ограниченная наружной линией контакта захвата с объектом манипулирования); pа и рв — атмосферное и остаточное давление в камере присоса, в расчетах обычно принимают pа - pв = (3,0...3,5) Па.
В качестве примера рассмотрим расчет грузозахвата, приведенного на рис. 8.34, в, - захват с пневмоприсосками, предназначенный для переноски и кантования прямоугольных грузов (например, в картонной упаковке). Рычажная система захвата служит лишь для подвода пневмоприсосок, которые затем удерживают груз; не требуется раз-
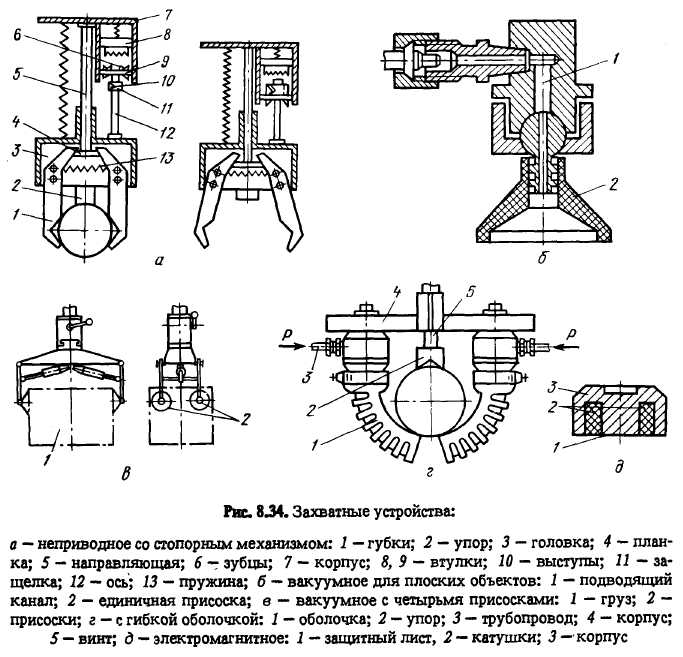
вивать большого сжимающего усилия, опасного для груза. Кантование осуществляется в результате отключения одной пары присосок и манипуляций с грузом при помощи оставшейся включенной парой присосок. Каждая из присосок установлена на рычаге, который может вращаться относительно горизонтальной оси. Таким образом, возможны два режима работы данного захвата: четырьмя присосками -при переносе груза; двумя присосками - при кантовании груза. В первом случае расчетная схема должна предусматривать расчет удержания груза четырьмя присосками под действием трех составляющих сил Fx , Fy и Fz . Во втором случае достаточно выполнить расчет на удержание груза двумя присосками под действием силы F.
Расчет
на удержание груза при переносе груза
четырьмя присосками (расчет на сдвиг
от силы
![]() )
выполним, приравнивая силы трения
и сдвигающую силу FH:
)
выполним, приравнивая силы трения
и сдвигающую силу FH:
![]()
Кроме того, следует рассчитать на прочность (устойчивость) манжету присоски, которой приходится воспринимать силу Fx. С учетом возможного смещения центра тяжести груза от середины расстояния между двумя присосками рекомендуется присоску рассчитывать на величину силы сжатия, равную 0,75Fx.
Расчет захвата на кантование груза двумя присосками:
Расчеты рычагов захвата на прочность следует проводить с учетом действия всех составляющих сил Fx ,Fy и Fz.
Приводы ПР. Промышленные роботы оснащаются электромехани-ческими, гидравлическими и пневматическими приводами. Приводы ПР могут быть разомкнутыми и замкнутыми (следящими). | В электромеханических приводах используют двигатели посто-янного тока серии ПБВ, ПСПТ, ДК-1, ПЯ, шаговые ДРШ, ШД-5 и асин-хронные типа ДПУ. В состав электропривода ПР входят усилители мощности (ТП), передаточные механизмы (МП), датчики обратной связи по скорости (ДС) и по положению (ДП), сравнивающие устройства по скорости (PC) и по положению (РП). В электромеханическом при-воде ПР важнейшей составной частью является передаточный меха-Инизм. В последнее время широко применяют волновые зубчатые передачи и планетарные зубчатые передачи.
Широко применяют в ПР комплектные регулируемые электро-двигатели постоянного тока, содержащие малоинерционные двигатели, устройство управления и электромагнитный тормоз; например, комп-Япектные приводы ЭТУ-3601 мощностью 1,0...10 кВт и ЭТУ-3602 мощ-июстью 10...30 кВт обладают высокой перегрузочной способностью по моменту (в 5...7 раз) и моментом инерции у этих двигателей в 5...6 раз меньше, чем у обычных.
В Электромеханические приводы имеют широкий диапазон по грузоподъемности, однако применение высокооборотных электро-Ицвигателей требует сложных и громоздких передаточных механизмов. В гидравлических приводах используют гидроцилиндры с посту-Ипательно-возвратным движением штока, гидродвигатели поворотного типа и гидромоторы. Грузоподъемность этих приводов практически без ограничения: от 10 кг и выше. Однако на их работу существенно-Излияют внешние условия, особенно температура, которая изменяет вязкость жидкости, что приводит к непостоянству скоростей и сни-Вкает точность позиционирования.
Следящий гидропривод состоит из гидроцилиндра (ГД), электри-таеского гидравлического усилителя (ЭГУ) и датчика обратной связи (ДОС) по положению штока. Эти приводы предназначены для осущест-Ввления поступательных движений механизмов ПР, поступающих от
задающего устройства на привод в виде электрических сигналов Uвх , которые передаются на электронный усилитель (ЭУ), далее на ЭГУ и ГД. В процессе отработки сигнал обратной связи в виде напряжения Uoc поступает на сумматор.
Приводы серии ПЭГС выпускают тринадцати типов (L = 545... 1485 мм; Я = 220...280 мм) с ходом поршня 250...1000 мм при скорости поступательного движения до 1000 мм/с; точность позиционирования- 0,5...1,5 мм.
Пневматические приводы, где исполнительными элементами служат пневмоцилиндры, поворотные и ротационные двигатели, применяют в ПР грузоподъемностью до 20 кг. Они имеют ряд преимуществ: высокие скорости звеньев (до 2,0 м/с), возможность работать в сложных эксплуатационных условиях (запыленность, взрыво- и пожароопасность). Недостатком пневмоприводов является невысокая статическая жесткость, связанная со сжимаемостью воздуха, что создает трудности в поддержании скорости и точности позиционирования.
Пневмоцилиндры бывают одностороннего и двухстороннего действия, неполноповоротные пневмодвигатели и мембранные камеры. Рабочей средой в пневмоцилиндрах является сжатый воздух (0,6 МПа). В качестве механизма, преобразующего поступательное движение штока пневмоцилиндра во вращательное движение выходного вала, используют зубчато-реечную передачу.
Механизм передвижения тележки ПР практически идентичен механизму передвижения мостового крана. Иногда привод всех колес осуществляют от одного двигателя посредством цепных передач.
Система программного управления. Основное назначение систем программного управления (СПУ) - ввод и запоминание программы, подача команд на перемещение рабочих органов и контроль выполнения команд.