

5.10. Винтовые конвейеры
Винтовые конвейеры применяют на элеваторах и в зернохранилищах, на комбикормовых заводах, фермах как дозирующее устройство и во многих отраслях пищевой промышленности.
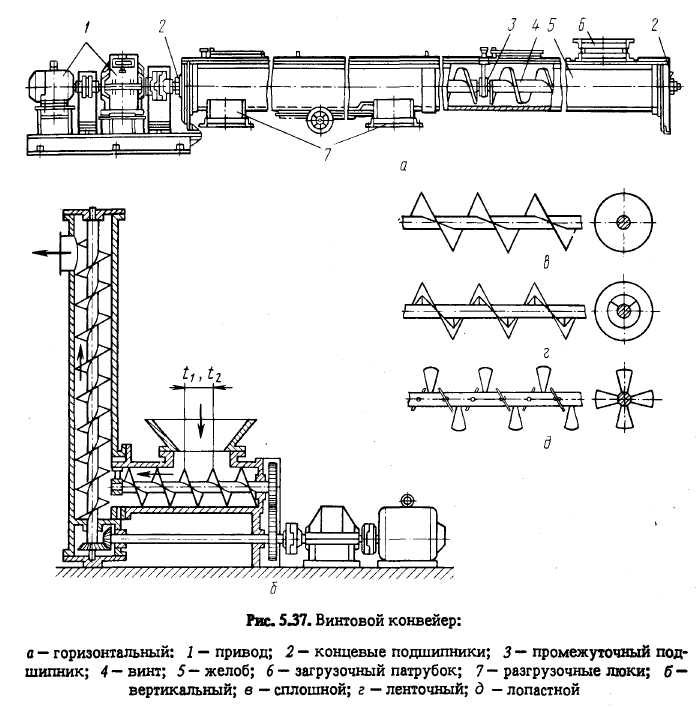
Винтовые (шнековые) конвейеры (рис. 5.37) предназначены для горизонтального, наклонного и вертикального перемещения сыпучих грузов.
5.10.1. Типы и область применения
Винтовые конвейеры бывают стационарными и передвижными. Последние используют обычно в складах и на механизированных площадках для погрузки зерна в автомобили и железнодорожные вагоны.
Различают тихоходные (частота вращения винта не более 200 об/мин) и быстроходные конвейеры.
В зависимости от направления витков спирали винты конвейера бывают правыми и левыми. Под правым понимают конвейер, в котором продукт движется к наблюдателю при вращении винта по часовой стрелке, под левым - против, т. е. при вращении винта по часовой стрелке продукт движется в обратном направлении. Некоторые винтовые конвейеры состоят из двух частей, из которых одна правая, а другая - левая, чем обеспечивается перемещение продукта в противоположные направления.
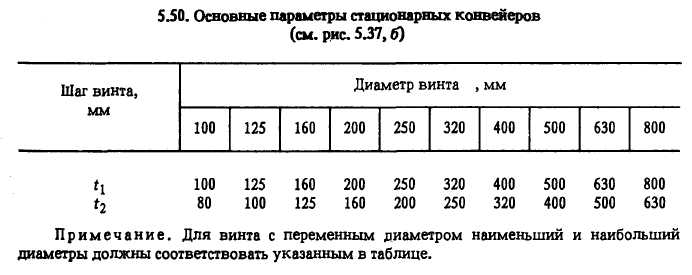
Основные параметры (диаметр и шаг винта) стационарных винтовых конвейеров общего назначения определены ГОСТ 2037 (табл. 5.50).
На предприятиях получили распространение винтовые конвейеры типа УШ2-Ч, предназначенные для перемещения зерна, комбикормов, отрубей и других сыпучих продуктов с насыпной плотностью 0,25... 0,75 т/м3. Винт состоит из отдельных секций, соединенных между собой пальцами. Для предохранения от завала в разгрузочном патрубке установлен мембранный сигнализатор уровня.
Винтовой конвейер ТЗШ-100. Передвижной, самоходный. Конвейер (рис. 5.38) предназначен для перемещения зерна в наклонном направлении под углом до 60°. Кожух винтового конвейера состоит из трех секций: нижней, на которой смонтированы привод винта (шнека), задняя пара колес, лебедка для поворота сбрасывающего патрубка и раздвижная приемная воронка; средней, снабженной очистными люками, и верхней с поворотным выпускным патрубком. Загрузочное устройство снабжено защитной решеткой.
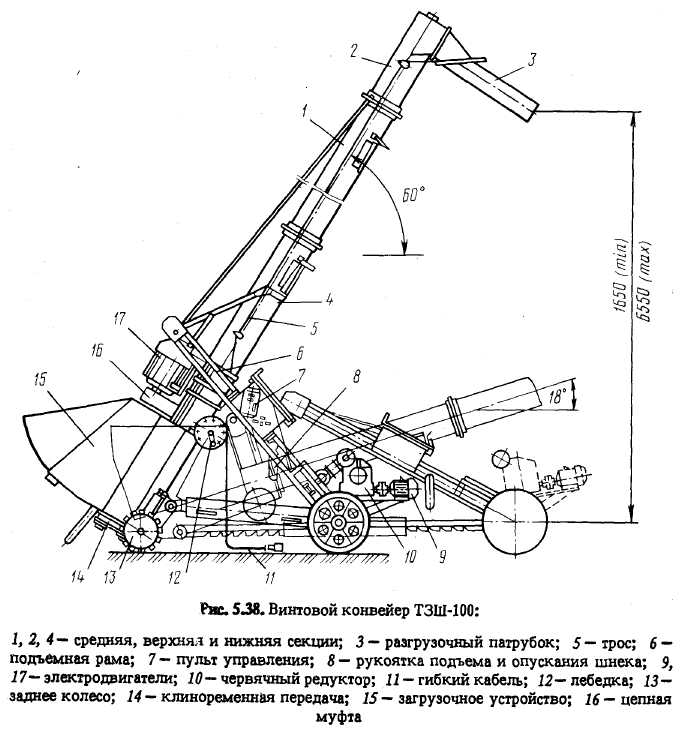
Секции кожуха винтового конвейера соединены между собой фланцевыми соединениями, а секции винта - при помощи шарнир-но-зубчатых муфт. Выпускной патрубок смонтирован на поворотном круге верхней секции и может быть повернут при помощи лебедки и троса.
Передвижение конвейера обеспечивается передачей вращения от электродвигателя через редуктор и две цепные передачи одному из передних колес. Для поворота при движении задняя пара колес снабжена роликами, обеспечивающими качение этих колес в любом направлении. Перемещение хвостовой части конвейера при повороте осуществляют вручную, для чего предусмотрены ручки, приваренные к приемной воронке.
Высоту сброса зерна устанавливают, изменяя расстояние между передними и задними колесами при помощи полиспаста, связывающего основания конвейера и поворотной рамы. Лебедка конвейера, установленная на поворотной раме, имеет ручной и электрический приводы. Для изменения угла наклона конвейера используют тот же двигатель и редуктор, что и для передвижения.