

Движение (функционирование) системы
Движение системы — процесс последовательного изменения состояния системы [21].
Вынужденное движение — движение системы под влиянием внешней среды, которое приводит к изменению ее состояния. Вынужденное движение (пример) — перемещение ресурсов под действием приказа (поступившего в систему извне).
Собственное движение — движение системы без воздействия внешней среды (только под действием внутренних причин). Собственным движением человека будет его жизнь как биологического (а не общественного) индивида, т.е. питание, сон, размножение [21].
Рассмотрим зависимости состояний системы от функций (состояний) входов, переходов, выходов системы.
Состояние системы Z(r) в любой момент времени t зависит от функции ее входов (состояния входов).Х(г) [21]:
7it) = Fc{X(t)].
Состояние системы Z(t) в любой момент времени t также зависит от предшествующих ее состояний в моменты Z(M), Z(r-2),... т.е. от функций состояний (переходов):
Z(f) = Fc[X(t), Tit-W Zit-2),...], (1.6)
где Fc — функция состояния (переходов) системы.
Связь между функцией входа X(t) и функцией выход У(г) системы, без учета предыдущих состояний, можно представить в виде:
Y(t) = FB[X(t)l где Fb — функция выходов системы. Система с такой функцией выходов называется статической [21].
Если же система зависит не только от функций (состояний) входов X(t), но и от функций состояний (переходов) Z(r-1), Z(r-2)то
Y(t) = FB[X(t), Z(t), ДМ), Z(r-2)...]. (1.7) Системы с такой функцией выходов называются динамическими (или системами с поведением) [21].
В зависимости от характера математических свойств функций входов и выходов систем различают системы дискретные и непрерывные.
Для непрерывных систем выражения (1.6) и (1.7) запишутся в виде [21]:
dZ(t)
—y = Fc[X(t),Z(t)]; (1.8)
at
Y(t) = FB[X(t),Z(t)l (1.9)
Уравнение (1.8) определяет состояние системы и называется уравнением переменных состояний системы.
Уравнение (1.9) определяет наблюдаемый нами выход системы и называют уравнением наблюдений.
Функции Fc (функция состояний (переходов) системы) и FB (функция выходов) учитывают не только текущее состояние Z(r), но и предыдущие состояния Z(r - 1), Zit - 2),Z(t - v) входов системы.
Предыдущие состояния являются параметром «памяти» системы. Следовательно, величина х> является объемом (глубиной) памяти системы. Иногда ее называют глубиной V интеллекта памяти [21]. 16
1.3. Характеристика процессов системы понятие процессов системы
Процесс — совокупность последовательных изменений состояния системы для достижения цели.
Входной процесс — множество входных воздействий, которые изменяются с течением времени.
Входной процесс можно задать, если каждому моменту времени t поставить в соответствие по определенному правилу со входные воздействия хаХ. Моменты времени t определены на множестве Т, t е 7. В результате этот входной процесс будет представлять собой функцию времени со:Г—> Х[х].
Функции входных процессов — задание, по определенному правилу, в определенные моменты времени, управляющих воздействий.
Выходной процесс — множество выходных воздействий на окружающую среду, которые изменяются с течением времени.
Воздействие системы на окружающую среду определяется выходными величинами (реакциями). Выходные величины изменяются с течением времени, образуя выходной процесс, представляющий функцию у. Г-> Y[X].
Функции выходных процессов — задание, по определенному правилу, в определенные моменты времени, выходных величин (реакций) системы.
Множество допустимых функций, характеризующих выходной процесс, обозначим Г = {у, Г—» Y}. Для обозначения мгновенных значений выходных величин в моменты t можно использовать обозначения y(t) [х].
Изменение состояния происходит с течением времени образуя движение системы, которое можно задать, если каждому моменту времени t с Т по определенному правилу ср поставить в соответствие состояние z с Z, т.е. движение системы будет представлять собой функцию (р: Т —> Z. Множество допустимых движений системы определяется на интервале Г: Ф = {дт. Т —> Z}. Множество допустимых начальных движений определяется Фо = {(fa: Тх Тх 0 —> Z}, где 0= {v} множество возможных величин отрезков v. Величина v зависит от памяти системы и может изменяться от Го ДО О И-
Множество допустимых входных процессов, определяемых различными функциями на интервале [to, t], описывается [40]: Ао,<)= {Oi^tyT-tX} с а
Следовательно, состояние Z(r) системы в момент времени f будет зависеть от начального момента t0 е Г, текущего времени t е Т, начального движения (ро s Ф0 на отрезке [г — v, to] и входного процесса а\а, i] t\ на интервале (?о, г]. Таким образом, состояние Дг) может быть определено с помощью переходной функции состояния [40]:
у/. ТхТхФох0^л^,Х.
k-v to
Рис.
1.3. Переходная функция.
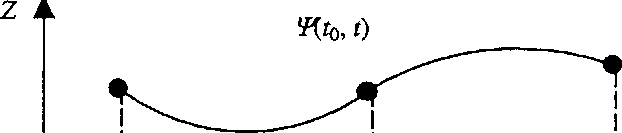
На рис. 1.3 отрезок движения системы ф на промежутке [г0
- v, г] будет представлять собой сочленение двух отрезков: фо
— начального движения на промежутке [Го - V, Го] и Ч'до,,] — отрезка переходной функции на интервале (tQ, г]-
Переходная функция состояния должна удовлетворять следующим требованиям [40].
Во-первых, поскольку знание начального движения системы фо на отрезке [fo - "О, Го] и отрезка входного процесса co(fo, г] на интервале (Го, г] является необходимым и достаточным условием, позволяющим определить состояние системы Z(f) в момент времени Г, то соотношение
Z(r) = vf(r, г0, фо, ю(ю,»])
должно быть определено во всех г > Го - и
Во-вторых, переходная функция состояния должна быть согласована с начальным движением и начальным состоянием:
Z(r) = 4\t, t0, ш(Ю, t]) = (paiU h, v) при г < г0; Z(r0) = ¥^г0. h, 4fb, о\л, rj) = (Po(fo, t0, v) при г < f0; для всех f е Т, z е Z, со е Q. Эти условия устанавливают также независимость начального движения фо и начального состояния Z(r0) от значений входного процесса, поскольку a\to, ,] = 0 при г < Го.
В-третьих, один и тот же входной процесс со определяет состояние системы на конце интервала времени (Го, г] независимо от того, действовал ли он последовательно, сначала на интервале (г0, г], а затем на интервале (г', г] или на всем интервале (г0, г].
Переходная функция состояния описывает переходный процесс системы.
Переходный процесс системы (процесс системы) — множество преобразований начального состояния и входных воздействий в выходные величины, которые изменяются с течением времени по определенным правилам.
ФОРМЫ входных и выходных