

2.8. Кулачковые механизмы
2.8.1. Общие сведения и классификация
Кулачковым называется механизм, в состав которого входит кулачок. Кулачком называется звено, которому принадлежит элемент высшей пары, выполненный в виде поверхности переменной кривизны. Кулачковые механизмы предназначены для преобразования движения ведущего звена, обычно вращающегося кулачка, в заданное движение ведомого звена (толкателя или коромысла).
Простейший кулачковый механизм (рис. 2.17, а) состоит из кулачка – звено 1, толкателя – звено 2 и стойки – звено 3. При вращении кулачка с угловой скоростью ω толкатель совершает возвратно поступательное движение относительно стойки. Постоянный контакт толкателя с кулачком обеспечивается с помощью пружины 4. Звенья 1 и 3 образуют вращательную кинематическую пару, звенья 2 и 3 – поступательную КП, а звенья 1и 2 – двухподвижную КП.
Кулачковый механизм представляет собой трехзвенный механизм с двумя одноподвижными (низшими) КП и одной двухподвижной (высшей) КП. Число степеней свободы
W = 3(n – 1) – 2 p1 – 1p2 = 3 (3 – 1) – 2 ·2 – 1 ·1 = 1.
Отсюда следует, что при заданном законе вращения кулачка толкатель будет двигаться по вполне определенному закону, зависящему от профиля кулачка и толкателя.
Основными достоинствами кулачковых механизмов являются возможность легко получить требуемый закон движения толкателя и компактность. Благодаря этому кулачковые механизмы получили широкое применение для привода клапанов двигателя, в стрелковом и другом вооружении, для размыкания контактов магнето, в счетно-вычислительных устройствах, в приборах, и особенно в машинах-автоматах.
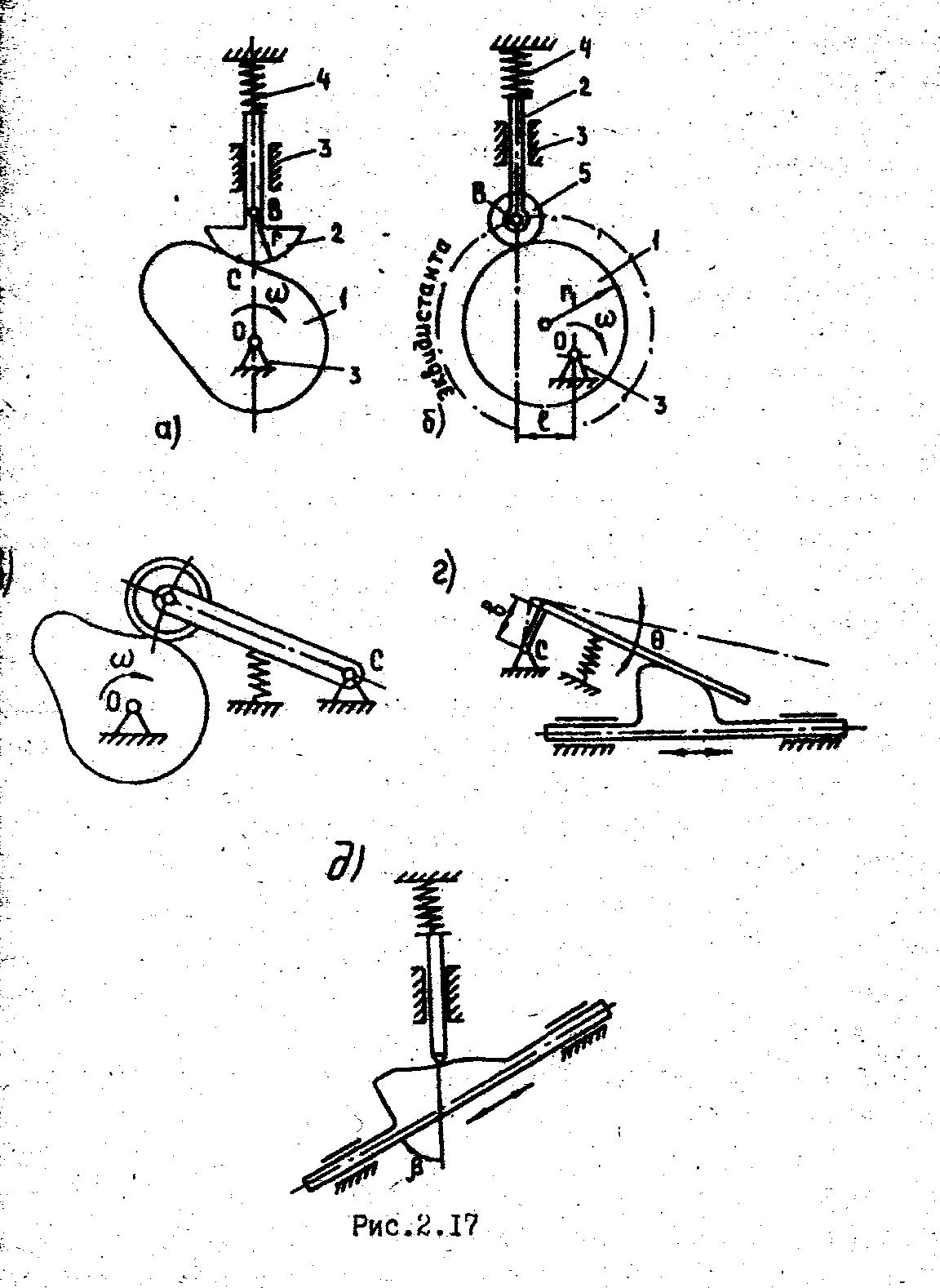
Рис. 2.17
Недостатки: большое удельное давление в месте касания двухподвижной пары (звенья 1 и 2), что приводит к большому износу; трудность изготовления кулачка сложного профиля; для нормальной работы необходимо применять силовое (пружины и др.) или кинематическое (пазы на кулачке и др.) замыкание, что усложняет конструкцию механизма. Для уменьшения трения между звеньями двухподвижной кинематической пары часто вводят особое звено – ролик 5 (рис.2.17, б), свободно вращающийся на оси, закрепленной на толкателе.
Кулачковые механизмы могут быть плоскими и пространственными.
В зависимости от характера движения кулачка и толкателя (коромысла) возможны следующие типы плоских кулачковых механизмов (рис.2.17, г): вращательное движение кулачка преобразуется в возвратно-поступательное или во вращательное (качательное) движение толкателя; возвратно-поступательное движение кулачка преобразуется во вращательное движение толкателя с размахом на угол θ или в возвратно-поступательное движение толкателя.
Профиль кулачка может быть очерчен окружностью радиуса r1 и кулачок вращается вокруг оси, не проходящей через его геометрический центр. Такой кулачок называется эксцентриком (рис.2.17,б). Кулачки могут быть выпуклыми и вогнутыми, когда профиль очерчен несколькими радиусами, и тангенциальными, когда боковые участки очерчены прямыми линиями.
Конец толкателя может быть с роликом, грибковидным, плоским, тарельчатым и др.
Основными параметрами кулачковых механизмов являются: действительный профиль, по которому очерчен кулачок; теоретический профиль кулачка – траектория центра ролика при движении толкателя по неподвижному кулачку, называемая эквидистантной (равноотстоящей на величину радиуса ролика rр ) кривой (рис. 2.17,б); минимальный rmin, максимальный rmax и текущий r радиусы кулачка; смещение линии движения толкателя от оси вращения кулачка (эксцентриситет) е ; максимальное перемещение (ход) толкателя h; фазы движения кулачкового механизма.
Окружность радиуса r0, центр которой совпадает с центром вращения кулачка, называется основной. Для коромысловых механизмов (с качающимся толкателем) характерен угол размаха коромысла θ.
Полный цикл движения толкателя за один оборот кулачка можно разбить на четыре фазы, которые характеризуются углом поворота φ или временем t, соответствующим этому углу (рис.2.18); φ1(t1) – фаза удаления, подъема толкателя или угол и время подъема; φ2 (t2) – фаза дальнего стояния или угол и время дальнего стояния (верхний выстой); φ3(t3) – фаза приближения, опускания толкателя или угол и время опускания; φ4 (t4) – фаза ближнего стояния или угол и время ближнего стояния (нижний выстой).

Рис. 2.18
Очевидно, что
φ1 + φ2 + φ3 + φ4 = 2π ; t1 + t2 + t3 +t4 =T ,
где Т – время одного оборота кулачка.