

2.7. Режимы работы машины
При работе машины от пуска до остановки в общем случае различают три режима: пуск или разбег, установившийся режим, остановка или выбег. Движение машины обычно характеризуется изменением угловой скорости ведущего звена во времени (рис. 2.16). Полное время работы машины
t = tp + tуст + t0,
где tp, tуст, t 0 – время разбега (пуска), установившегося движения и остановки (выбега).

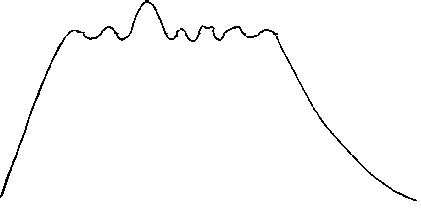
Рис. 2.16
Разбег (пуск) характеризуется приращением кинетической энергии; работа движущих сил больше работы всех сил сопротивлений (Ад > Ас ); угловая скорость движения увеличивается.
При установившемся движении приращение кинетической энергии за цикл равно нулю (Ад = Ас), угловая скорость остается постоянной (ω = const) или колеблется около некоторого среднего значения ωср.
Остановка (выбег) машины характеризуется отдачей всей кинетической энергии, накопленной за время разбега (Ад < Ас) на преодоление полезных и вредных сопротивлений; скорость убывает до нуля, машина останавливается.
Для сокращения времени пуска часто рабочую нагрузку (полезное сопротивление) снимают (холостой ход). Для уменьшения времени остановки машины применяют тормоза.
Основным режимом работы большинства машин (механизмов) является установившийся, при котором угловая скорость начала периода ω0 равна угловой скорости в конце периода ωк, а в другие моменты времени угловая скорость может быть переменной и отличаться от ω0. Это вызывает дополнительные динамические усилия в кинематических парах, понижает КПД машины (механизма) и надежность ее работы.
Установившееся движение нельзя смешивать с равномерным, при котором угловая скорость остается постоянной в любой момент времени t или при любом угле поворота ведущего звена φ.
Во время установившегося движения могут быть периодические и непериодические колебания скоростей ведущего звена (неравномерность движения механизма).
Неравномерность движения механизма можно оценить коэффициентом неравномерности.
![]() (2.35)
(2.35)
Чем меньше разность ω max и ωmin , тем равномернее вращается ведущее звено.
Неравномерность вредно сказывается на работе механизмов. Так, например, неравномерность работы механизма наведения арт. орудия снижает точность прицеливания; при неравномерном движении привода токарного станка ухудшается точность обработки изделия; неравномерное вращение генераторов, служащих для освещения, вызывает колебания силы света, вредно действующие на глаза человека и т.п. Для механизмов, особенно ответственных, устанавливается допускаемый коэффициент неравномерности движения.
Задача регулирования движения механизма на установившемся режиме сводится к подбору такого соотношения между массами механизма и действующими на него силами, при котором коэффициент δ не превышал бы заданного значения.
При периодических колебаниях угловая скорость ведущего звена механизма регулируется при помощи массивного маховика, обладающего большим моментом инерции.
Непериодические колебания скоростей регулируются специальными регуляторами, которые автоматически устраняют возникшую по каким-либо причинам разность между величинами движущих сил и сил сопротивления и обеспечивают постоянство средней скорости и числа оборотов. Широкое применение находят центробежные, тормозные, пусковые регуляторы различных конструкций.