

Анализ принципа построения механизма
При решении инженерных задач анализа и синтеза механизмов возникает необходимость разделять их по уровню структурной сложности и соответственно выбирать методы исследования и построения.
Принцип членения плоских механизмов на типовые части (группы звеньев), различающиеся своей структурной сложностью, предложен профессором Ассуром Л.В. (1876-1920) и развит применительно к пространственным механизмам академиком Артоболевским И.И.
Сущность принципа заключается в следующем. Любой механизм можно расчленить на группу звеньев, подвижность которой совпадает с подвижностью всего механизма (число степеней свободы этой группы равно числу степеней свободы всего механизма), и группы звеньев с нулевой подвижностью (Wί = 0), различающихся по сложности.
Структурная формула механизма, отражающая указанный принцип, принимает вид
W = W + ∑ (W ί = 0). (2.2)
Кинематическую группу звеньев, подвижность которой совпадает с подвижностью всего механизма, называют группой начальных звеньев.
Начальные звенья по схеме обозначаются стрелками в направлении движения.
Кинематические группы звеньев нулевой подвижности называют группами Ассура.
Таким образом, любой механизм может быть представлен в виде группы начальных звеньев и групп Ассура.
В группу начальных звеньев входят стойка и одно или несколько подвижных звеньев, задающих движение механизма. На рис.2.7 представлены механизмы с одним (а) и двумя (б) подвижными начальными звеньями, имеющими, соответственно, одну и две степени свободы.
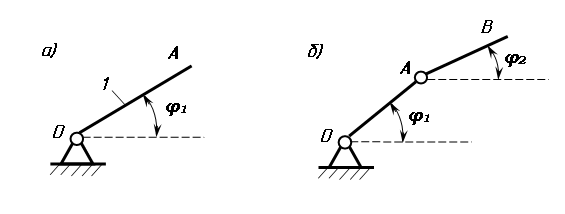
Рис. 2.7
Группы Ассура, будучи присоединенными к стойке, образуют кинематическую цепь нулевой подвижности, а будучи в таком же порядке присоединенными к другим кинематическим цепям, не изменяют их количества свобод движения. На рис. 2.8 представлены типовые группы Ассура (а, б); которые, будучи присоединенными к стойке, образуют кинематические цепи нулевой подвижности.
Звенья ОА (рис. 2.7,а ), АВ, ВС (рис.2.8, а), АВ, DE, CF (рис. 2.8,б ) со свободными элементами называют поводками, жесткое звено BCD (рис.2.8,б ) называют центральным. Группу Ассура (рис. 2.8,а) называют двухповодковой или диадой; группу (рис.2.8,б) – трехповодковой или триадой.
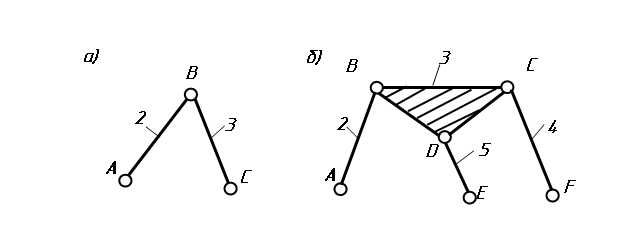
Рис.2.8
По числу поводков группы Ассура разделяют на группы 2-3-го и т.д. порядка.
Как группы, так и механизмы, в которые входят эти группы, разделяют на порядки. Механизму при этом присваивается порядок группы старшего порядка. Так, механизм, изображенный на рис.2.2, относится к механизмам второго порядка.
Класс группы определяется числом звеньев, в нее входящих. Например, диада – группа 1-го класса, 2-го порядка; триада – группа 2-го класса, 3-го порядка. В состав этих групп, соответственно, входят два и четыре звена. Число звеньев группы Ассура должно быть четным.
Таким образом, шарнирный четырехзвенный механизм (рис.2.2) образован путем присоединения к группе начальных звеньев (рис.2.7, а) с
W = 3n – 2p1 = 3 ·1 – 2 ·1 = 1,
группы Ассура (рис.2.8, а) с W = 3 ·2 – 2 ·3 = 0.