


186 |
Design and practice of small antennas I |
|
|
|
|
|
Measured Eθ |
|
|
|
|
|
|
Simulated Eθ |
|
|
|
|
|
|
Measured Eφ |
|
|
|
|
θ = 0° 0 |
|
Simulated Eφ |
θ = 0°0 |
|
|
|
−30° |
|
|
−30° |
||
|
30° |
|
|
30° |
||
|
−10 |
|
|
|
−10 |
|
60° |
−20 |
|
−60° |
60° |
−20 |
−60° |
|
−30 |
|
|
|
−30 |
|
90° |
|
|
−90° |
90° |
|
−90° |
120° |
|
|
−120° |
120° |
|
−120° |
|
150° |
−150° |
|
|
150° |
−150° |
|
180° |
|
|
|
180° |
|
|
(a) |
|
|
|
(b) |
|
|
θ = 0°0 |
−30° |
Measured |E| |
θ = 0° 0 |
−30° |
|
|
30° |
Simulated |E| |
30° |
|||
|
−10 |
|
|
|
−10 |
|
60° |
−20 |
|
−60° |
60° |
−20 |
−60° |
|
−30 |
|
|
|
−30 |
|
90° |
|
|
−90° |
90° |
|
−90° |
120° |
|
|
−120° |
120° |
|
−120° |
|
150° |
−150° |
|
|
150° |
−150° |
|
180° |
|
|
|
180° |
|
|
(c) |
|
|
|
(d) |
|
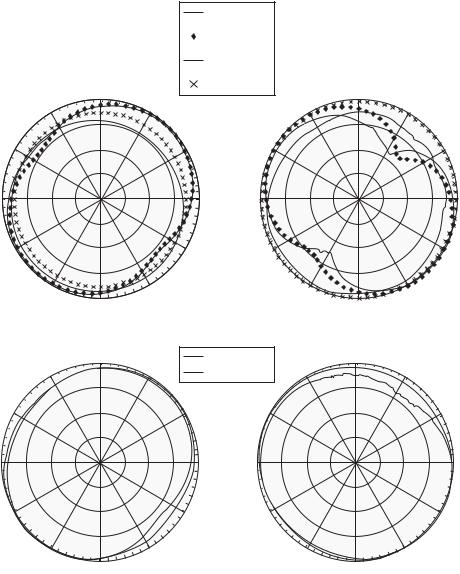
Figure 7.154 Radiation patterns of SWA (a) x–z plane (Eθ and Eϕ ), (b) y–z plane (Eθ and Eϕ ), x–z plane (|E|) and (d) y–z plane (|E|) ([75], copyright C 2009 IEEE).
patterns are illustrated in Figure 7.154, in which (a) and (b) show Eθ and Eϕ patterns on the x–z plane and y–z plane, respectively, and (c) and (d) show |E| patterns on x–z plane and y–z plane, respectively. They show almost isotropic patterns due to combined radiation from four arms in three directions which distribute energy in all directions and radiation of both horizontal and vertical polarizations for most directions.

7.2 Design and practice of ESA |
187 |
|
|
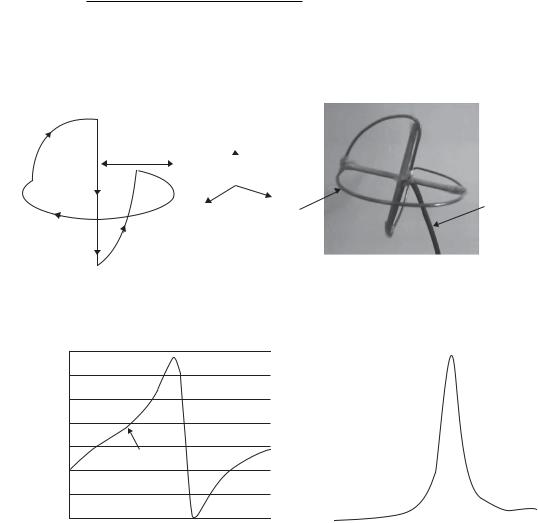
Figure 7.155 Multi-turn folded spherical helix dipole antenna ([76], copyright C 2010 IEEE).
7.2.2.2.3.4 Spherical magnetic (TE mode) dipoles
Magnetic (TE mode) dipoles can be designed to have complementary structure of electric (TM mode) dipoles. A similar folded-slot spherical helix that exhibits a magnetic dipole mode is developed by following the basic design concepts used with the folded spherical helix electric dipole [76]. The developed antenna has low VSWR, high radiation efficiency, and a low Q at a small value of ka. Impedance, radiation patterns, and Q properties are discussed.
Before describing the magnetic spherical helix, the electric spherical helix is introduced. As an example, a multi-turn folded spherical helix dipole is considered and the configuration is shown in Figure 7.155, which depicts a single, center-fed conductor, wound around the spherical structure. The outer radius of the sphere is about 4.22 cm and the conductor diameter is 2.6 mm. Self-resonance is achieved by adjusting the total length of the conductor, and impedance matching is done by increasing the number of conductors uniformly around the surface of the imaginary sphere and connecting them at the top and bottom of the sphere. With four folded arms shown in Figure 7.155, self-resonance is achieved at 300.7 MHz, where ka = 0.266, at which the resistance is equal to 49.7 that can match to the load of 50 , radiation efficiency is 97%, and a Q is 84.2. This Q value is about 1.53 times the lower bound of 55.2, consistent with the limit derived by Thal [77]. Radiation pattern is given in Figure 7.156, which indicates a dominant electric dipole or TM mode (Eθ ) pattern, having omnidirectional pattern in the horizontal plane.
Here a thin wall, hollow copper sphere having an outer radius of 4.3 cm is considered and a slot is inscribed within the sphere in a shape similar to the conductors of the folded spherical helix so as to form the complementary structure. Figure 7.157 illustrates a two-arm (double slot) version of the folded slotted spherical helix. The antenna is fed horizontally at the slot located on the x–y (vertical) plane as shown in the figure. Similar to the electrical dipole version, the resonance frequency can be adjusted by increasing or decreasing the slot length. Radiation resistance can be increased by increasing the number of slots uniformly around the sphere. The two-arm version is self-resonant at a frequency of 294.86 MHz, but the radiation resistance is less than 1 . Q is 503. With increase
188 |
Design and practice of small antennas I |
|
|
30 |
010 |
30 |
dB |
||
|
0 |
|
60 |
–10 |
60 |
|
|
|
|
–20 |
|
90 |
|
90 |
120 |
|
120 |
150 |
|
150 |
|
180 |
|
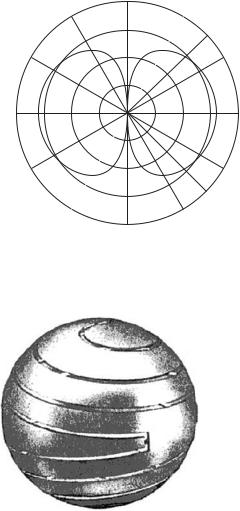
Figure 7.156 θ -sweep radiation pattern of the four-arm folded spherical helix (dominant polarization is Eθ ) ([76], copyright C 2010 IEEE).
Figure 7.157 Two-arm folded spherical helix dipole ([76], copyright C 2010 IEEE).
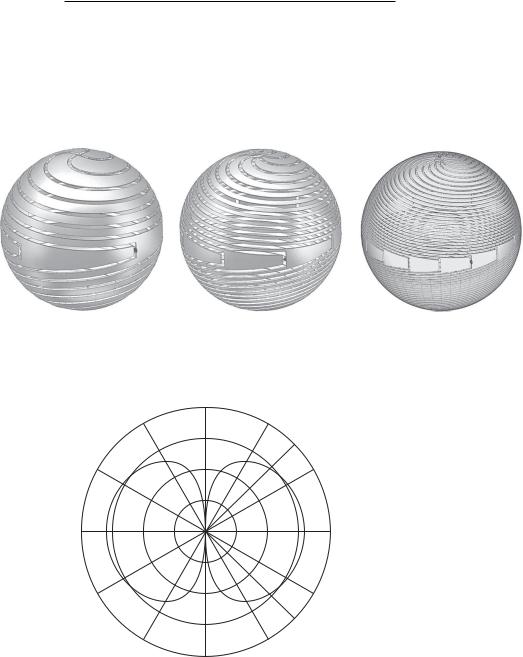
in the number of arms, radiation resistance can be increased as shown in Table 7.19; however, with 16 slots self-resonance can be achieved. The slots are connected at the top and bottom of the sphere. The 4, 8, and 16-arm versions of the antenna are illustrated in Figure 7.158(a), (b), and (c), respectively. The performances are provided in Table 7.19, where the 16-arm version shows Q of 148.5, that is about three times the lower bound. Radiation pattern of the 16-arm version is shown in Figure 7.159, which indicates a dominant magnetic dipole or TE mode (Eϕ ) pattern, having omnidirectional pattern in the vertical plane.
Three other modified spherical magnetic dipoles are developed [78]. Antenna configurations are illustrated in Figure 7.160, where (a) multi-arm spherical helix (MSH),
190 |
Design and practice of small antennas I |
|
|
|
|
Excitation |
Feed point |
||
|
|
dipole |
Z |
|
|
Z |
|
|
|
Z |
|
|
|
|
|
||
|
|||||
Excitation |
|
|
|
|
Excitation |
|
|
|
|
||
dipole |
|
|
|
|
dipole |
|
|||||
Feed point
Feed point
(a) |
(b) |
(c) |
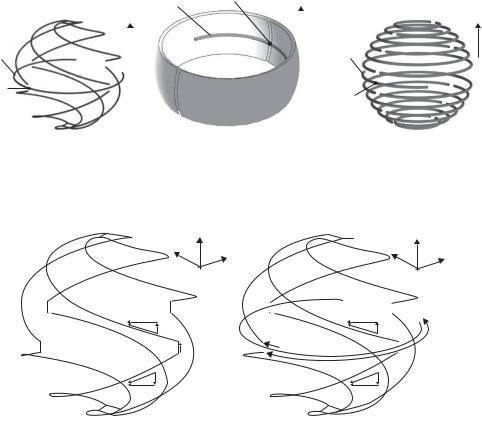
Figure 7.160 Geometry of spherical magnetic dipole (TE10 mode) antenna: (a) multi-arm spherical helix (MSH) antenna, (b) spherical split-ring resonator (S-SRR) antenna and (c) spherical split ring (SRR) antenna, ([78], copyright C 2010 IEEE).
|
Y |
Z |
|
|
Z |
|
X |
|
Y |
X |
|
|
|
|
|
||
Iϕ |
|
|
|
Iϕ |
|
|
Iθ |
|
V |
Iθ |
|
I |
V |
|
I |
|
|
|
|
|
|
|
|
I |
|
|
α |
I |
|
|
Iθ |
|
|
Iθ |
|
Iϕ |
|
|
|
Iϕ |
|
(a) |
|
|
(b) |
|
|
Figure 7.161 Multi-arm spherical helix (MSH) antenna: (a) TM10 (electric mode) and (b) TE10 (magnetic mode) ([78], copyright C 2010 IEEE).
(b) spherical split ring resonator (S-SRR) antenna, and (c) spherical split ring (SSR) antenna are shown.
The TE10 MSH is a modification of a spherical helix developed by Best [72]. In the TM10 MSH antenna, the top and bottom of the arms are disconnected and a curved dipole is placed at the quarter of the antenna sphere as shown in Figure 7.161(a), where in (b) a TE10 spherical mode is also shown as a reference. The antenna is fed at the midpoint of the driven dipole by applying driving voltage horizontally so as to cancel the far-field contribution from the θ -component produced by the electric current (Iθ ), resulting in only fields of the desired TE10 spherical mode remaining. The antenna is tuned to the resonance by changing the number of turns (Nturns) in the arm for given frequency f0 and number of arms (Narms) as is shown in Figure 7.162, where input impedance at f0 = 300 MHz is plotted for antennas of Narms = 2, 4, 6, and 8. All antennas have radius of 40 mm, and the wire radius is set to 0.5mm. The antenna occupies a spherical volume


192 |
Design and practice of small antennas I |
|
|
t |
|
rmnp |
|
r0 |
|
Y |
|
α |
X |
β |
|
Z |
Feed point |
0.5 g
Figure 7.163 Spherical split-ring resonator (S-SRR) antenna on a ground plane ([78], copyrightC 2010 IEEE).
r0
α
y
z
2γ
Feed point |
|
0.5 g |
x |
|
|||
|
|
|
|
Figure 7.164 Spherical split ring (SSR) antenna on a ground plane ([78], copyright C 2010 IEEE).
in the resonance frequency is minor, being only 1.5 MHz. For β = 73◦, the resonance frequency f0 is 297.0 MHz and ka = 0.133. The input impedance can be adjusted by the length of the driven dipole, and with α = 55◦, the input resistance at the resonance R0 is 50 for the optimal β = 73◦. The lowest Q/Qlb obtained is around 3.4, which is nearly the same as that of MSH.
The spherical split ring (SSR) antenna consists of individual wire split rings distributed evenly in θ as shown in Figure 7.160(c). Every two neighbor rings are flipped with respect to each other and thus, operate as a conventional SRR. Multi-element SRR is constituted by combining rings with other rings so that uniform current distribution over the spherical surface is realized and the resonance frequency is lowered. The number of the rings is chosen to be odd, so that the antenna is driven at the central split ring, the length of which is adjusted to attain the input impedance to match the feed line. Since the SSR has symmetrical structure, it can be made in half and mounted on the ground plane as shown in Figure 7.164. The resonance frequency is changed by the number of split rings Nsr and is determined by using the following expression
Nsr = 2int(90◦/γ ) − 1 |
(7.68) |