

4.5.3 Устройства защиты от нип
Для защиты РЛС от помех, частота следования которых не совпадает с частотой повторения импульсов РЛС, можно использовать схему типа ограничитель − накопитель (схема ШОУ для пачки импульсов).
Ограничение входных сигналов производится с целью исключения влияния на выходной сигнал накопителя их амплитуды. Уровень ограничения выбирается из условия допустимых потерь в отношении сигнал/шум (обычно Uогр = (2-3) σш). В качестве накопителя могут быть применены рециркуляторы, интегрирующие потенциалоскопы и т.д.
При использовании для защиты от НИП схемы ШПУ селектор помехи может быть выполнен на основе устройства ЧПК (рис.4.34, схема ШПУ для пачки импульсов).
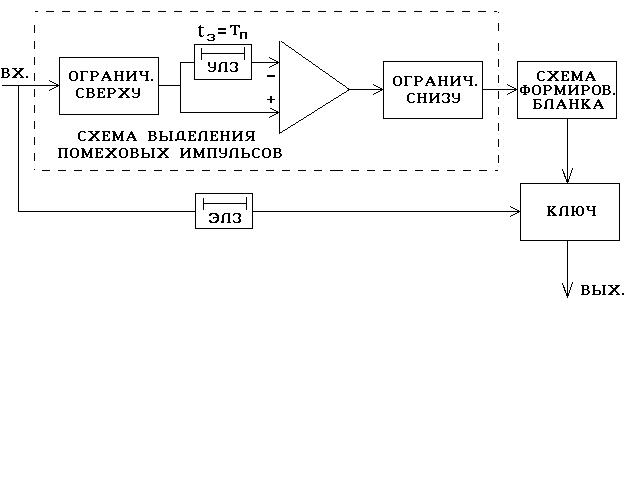
Рис.4.34. Схема защиты РЛС от НИП
4.5.4 Особенности построения устройств защиты от ответных импульсных помех
Задачу защиты от ОИП можно разделить на две части: защиту от опережающих ОИП; защиту от ОИП по боковым лепесткам ДНА.
Защита от опережающих ОИП может быть осуществлена двумя способами. Первый способ основан на использовании быстрой поимпульсной перестройки рабочей частоты РЛС.
Если скорость перестройки Vспс ≥ Ппр/Тп, где Ппр − полоса пропускания приемного устройства, Тп − период повторения импульсов РЛС, то опережающие импульсы ОИП не попадут в тракт ввиду того, что их несущая частота будет соответствовать частоте РЛС в предыдущем цикле излучения.
Второй способ основан на использовании переменного запуска и аппаратуры защиты от НИП. При изменении Тп от периода к периоду опережающие импульсы ОИП приобретают свойства НИП и подавляются в аппаратуре защиты от НИП.
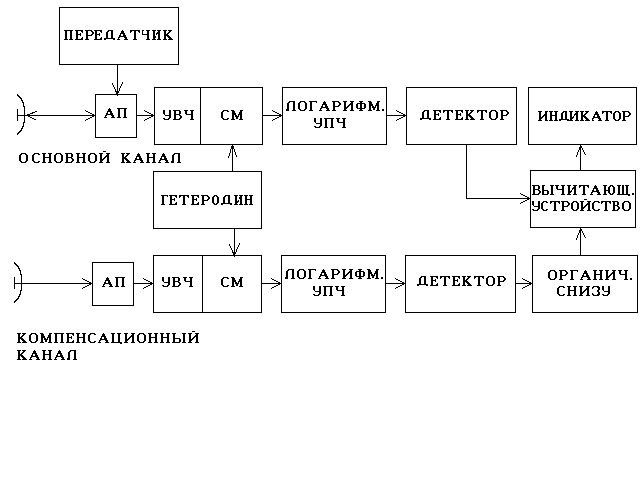
Для подавления ОИП, принятых по боковым лепесткам ДНА, применяются системы подавления бокового ответа (ПБО), состоящие из дополнительной приемной антенны, диаграмма направленности которой огибает боковые лепестки диаграммы направленности основной антенны (рис.4.35,а) и канала обработки выходных сигналов этой антенны. Упрощенная структурная схема РЛС с устройством подавления бокового ответа представлена на рис. 4.35,б.

a)
б)
Рис.4.35. РЛС с устройством подавления импульсных помех по боковым лепесткам ДН приемной антенны: а) форма ДН основной (1) и дополнительной (2) антенн; б) структурная схема РЛС
Коэффициент усиления антенны дополнительного канала и его тракта приема выбирается таким образом, чтобы для помеховых сигналов, пришедших с направления боковых лепестков ДНА основного канала приема, выполнялось условие
Uп д > Uп о, (4.23)
где Uп д и Uп о − амплитуды помеховых импульсов на выходе дополнительного и основного каналов приема.
Если вычитающее устройство отрегулировано так, что на его выход проходят сигналы только в случае превышения сигналов основного канала над сигналами дополнительного канала, то импульсные помехи, принятые боковыми лепестками, будут полностью подавлены.
Логарифмические усилители применены для расширения динамического диапазона приемных каналов.
В связи с тем, что кроме импульсных помех в приемных каналах имеются некоррелированные шумы, при сравнении огибающих сигналов будут случаи, когда сигналы, принимаемые основным лепестком ДН, будут подавляться, а помехи с направления боковых лепестков не будут подавляться. Кроме того, при вычитании шумы каналов суммируются по мощности, что приводит к уменьшению вероятности обнаружения цели в РЛС с ПБО.
Для повышения чувствительности РЛС с каналом ПБО условие (4.23) должно выполняться при как можно меньшем коэффициенте усиления приемного тракта канала ПБО. Для этого нужно увеличить коэффициент усиления дополнительной антенной. Однако чрезмерное увеличение коэффициента усиления дополнительной антенны может привести к возникновению эффекта перекомпенсации помех и, как следствие, к подавлению слабых полезных сигналов на выходе вычитающего устройства.
Обычно обеспечивают выполнение условия
Gд(θ) ≈ Gбл(θ),
где Gд(θ) − коэффициент усиления дополнительной антенны; Gбл(θ) − уровень боковых лепестков ДН основной антенны. Выполнить это условие в диапазоне θ, равном примерно 2π, практически возможно только лишь при использовании нескольких слабонаправленных антенн.
Для снижения вероятности подавления слабых полезных сигналов шумовыми выбросами между выходом детектора огибающей дополнительного канала и схемой вычитания дополнительно включают ограничитель снизу. Уровень ограничения выбирают из условия допустимого снижения качества обнаружения полезных сигналов при включении системы ПБО.
При Uогр = (4-5) σш включение канала при отсутствии ОИП практически не влияет на качество обнаружения полезных сигналов.