

6.5 Системы вращения антенн рлс ртв
6.5.1 Назначение, режимы работы, классификация систем вращения антенн и основные тактико-технические требования, предъявляемые к ним
Системы вращения антенн (СВА) предназначены для осуществления обзора пространства в горизонтальной плоскости с заданными параметрами зоны обзора и программой. Эти системы обеспечивают как круговое вращение антенны с узким в горизонтальной плоскости лучом в пределах 0-360, так и программное управление антенной в секторе, а также установку антенны на заданный азимут.
Различные условия боевой обстановки (обнаружение РЛС низколетящих, высотных, малоразмерных и маневрирующих целей в простых условиях или в условиях активных и пассивных помех) требуют применения гибких методов обзора пространства, изменения скорости вращения, остановки антенны на заданном направлении или попеременное изменение направления сканирования в заданном секторе.
В связи с этим в РЛС РТВ используются следующие основные режимы работы СВА:
круговое вращение с постоянной заданной скоростью;
установка антенны на заданный азимут;
сканирование в заданном азимутальном секторе.
Круговое вращение с постоянной скоростью используется в дальномерах. Выбор скорости вращения обусловлен дискретностью информации, условиями получения требуемого количества эхо-сигналов в пачке и техническими условиями реализации СВА. Возможность изменения скорости вращения в этом режиме позволяет полнее использовать возможности РЛС и РЛК по обнаружению воздушных объектов.
Режимы установки на заданный азимут и сканирование в заданном азимутальном секторе чаще используется в высотомерах.
Системы вращения антенн РЛС РТВ можно классифицировать по двум признакам:
по схеме построения контура управления вращением (привода вращения);
по типу исполнительного двигателя.
Контур привода вращения антенных систем может быть разомкнутого, замкнутого, комбинированного, следящего и неследящего типов.
В СВА применяют двигатели: постоянного тока; переменного тока; гидродвигатели (гидромоторы).
Применение двигателей постоянного тока позволяет обеспечить необходимый пусковой момент при меньшем токе якоря, а также технически простую реализацию режимов плавного и многоступенчатого изменения скорости вращения.
Двигатели переменного тока не требуют преобразователей тока, обеспечивают достаточную стабильность скорости вращения в условиях переменной ветровой нагрузки. В тоже время использование такого типа двигателя предъявляет жесткие по нагрузке на электростанцию, для них достаточно сложно осуществить плавное изменение скорости вращения.
Гидродвигатели по сравнению с электродвигателями характеризуются меньшими габаритами и массой, высокой надежностью, слабой чувствительностью к перегрузкам, они сами не перегружают сеть и позволяют легко изменять скорость и параметры вращения (вращение влево, вправо, в секторе углов и т.д.).
Тактико-технические требования, предъявляемые к точности и периоду обновления информации, необходимой для обеспечения боевых действий РТВ, определяется содержанием и условиями задач управления. Для удовлетворения ТТТ, предъявляемых к информации, к СВА также предъявляются достаточно жесткие требования.
Основными требованиями, предъявляемыми к СВА, являются:
скорость обзора пространства в азимутальной плоскости;
точность определения угловых координат;
устойчивость к внешним воздействиям;
простота технической реализации;
эксплуатационная надежность;
габариты и масса;
число колебаний антенны около заданного положения при отработке угла рассогласования (не должно превышать двух);
время отработки заданного угла рассогласования (быстродействие СВА).
Связь между техническими требованиями, предъявляемыми к СВА, и техническими параметрами РЛС обусловлена следующими основными факторами.
Для обеспечения требуемой дальности обнаружения, количество некогерентно накапливаемых импульсов, отраженных от цели за время облучения, должно быть не менее заданной величины. Так, для РЛС сантиметрового диапазона эта величина составляет 10-40 импульсов.
Время облучения цели определяется выражением
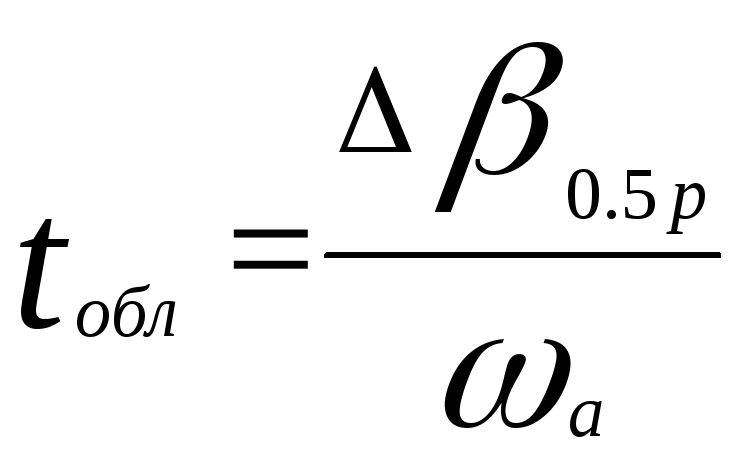
где Δβ0,5Р – ширина ДН в азимутальной плоскости по уровню половинной мощности; ωа – угловая скорость вращения антенны.
При заданной частоте повторения зондирующих импульсов (Fп) число импульсов в пачке составляет
 (6.19)
(6.19)
Из выражения (6.19) следует вывод: угловая скорость вращения антенны должна быть
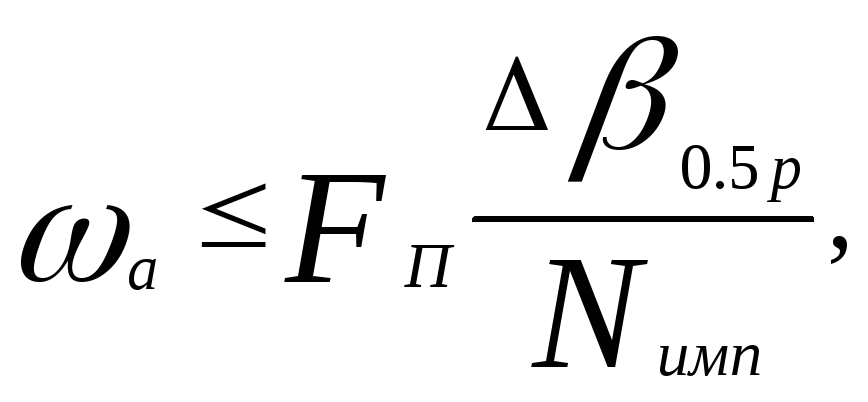 (6.20)
(6.20)
Для РЛС сантиметрового диапазона, согласно (6.20), при Fп = 375 Гц, Δβ0,5Р = 1о, Nимп = 10 получается, что ωа ≤ 6 об/мин.
С другой стороны, ограничение угловой скорости обзора пространства приводит к уменьшению частоты обновления информации, что отрицательно сказывается на качестве информации особенно при проводке скоростных и маневрирующих целей.
Потенциальная точность измерения азимута определяется, как известно, формой характеристики направленности G(β), G(ε) и энергетическим отношением сигнал/помеха в пачке отраженных от цели сигналов. Следовательно, высокие требования к точности определения угловых координат могут быть удовлетворены за счет сужения ДНА. Сужение ДН можно осуществить путем увеличения габаритных размеров антенны, что как известно приводит к увеличению веса антенны. Кроме того, увеличение габаритов антенны приводит к увеличению ветровых нагрузок (внешних воздействий).
Инструментальные ошибки при измерении угловых координат обусловлены погрешностями систем вращения, передачи угла поворота антенны, а также погрешностями формирования угловых масштабных отметок, запаздыванием координатной информации за время измерения координат и др. Следовательно, допустимая суммарная ошибка σ, обусловленная влиянием указанных факторов, будет определять выбор таких систем, которые смогут обеспечить необходимые требования к точности определения угловых координат.
Обычно принимается, что динамическая ошибка системы при заданной скорости вращения не должна превышать 10-30 угл. мин., а статическая ошибка в режиме ручного управления – 20 угл. мин.
Немаловажное значение имеет устойчивость систем вращения к внешним воздействиям.
Внешние воздействия представляют собой ветровые нагрузки на антенное устройство, изменение температуры окружающей среды, а следовательно и изменение вязкости смазок в редукторах вращающихся устройств, изменение питающих напряжений и т.д. Возмущающие воздействия приводят к изменению скорости вращения и качания антенны, к снижению точности работы систем в установившемся режиме.
Требования устойчивости к внешним воздействиям определяют выбор соответствующих классов СВА в каждой конкретной РЛС.