

7.4.2 Имитатор отражений от местных предметов (формирователь мп)
В основу работы рассматриваемого имитатора положены те же принципы, что и при имитации отражений от дипольных помех.
Особенность состоит в том, что отражения от местных предметов в метровом диапазоне волн можно считать (за редким исключением) неподвижными и нефлюктуирующими. Поэтому задача формирования таких помех упрощается, так как нет необходимости разрушать межпериодную корреляцию и можно обойтись одной реверберационной линией задержки, возбуждаемой ФКМ-сигналом.
Однако для проверки устройства межобзорной селекции необходимо сформировать отражения от дискретных местных предметов, положение которых по дальности изменяется в зависимости от азимута (от вращения антенны), что наиболее соответствует реальным отражениям от местных предметов. Формирование таких помех можно обеспечить путем соответствующей модуляции отклика РУЛЗ.
Таким образом, основу имитатора отражений от местных предметов составляют реверберационная ультразвуковая линия задержки, отклик которой на ФКМ-сигнал имитирует отражения от сплошных протяженных местных предметов (МПС), и модулятор, обеспечивающий формирование из сигналов МПС отражений от дискретных местных предметов (МПД).
Рассмотрим принцип построения и функционирования имитатора отражений от МП (рис.7.5). Имитация отражений от сплошных местных предметов (МПС) представляет собой отклик РУЛЗ1 либо на эталонный ФКМ-сигнал Uэт (основной режим работы), сформированный в системе оптимальной фильтрации (в блоке 053-03), либо на фазирующий импульс ФИ, подаваемый из фидерного тракта через приемную систему (из блока 031-06), либо на сигнал Ц2, подаваемый из блока 111-01. Необходимый сигнал на РУЛЗ1 подключается соответствующим кабелем внутри блока 111-02. Различные сигналы используются для соответствующих проверок. Использование фразирующего импульса позволяет проверить стабильность работы передающего и приемного устройств, а при необходимости сформировать местные предметы не в начале дистанции, а с некоторой дальности, используют сигнал Ц2, задав соответствующую дальность Ц2 на блоке управления имитатором (112-01).
Отклик РУЛЗ1 (рис.7.7, б) через УПЧ2 подается на электронный переключатель ЭП1 и при включении режима МПС (переключатель В1 на передней панели блока) поступает далее на сумматор и на ключ Кл2, где он стробируется импульсом «ДЛИТ. МП», подаваемым из блока 112-01. Сформированный сигнал МПС через аттенюатор Атт1 подается на выход блока.
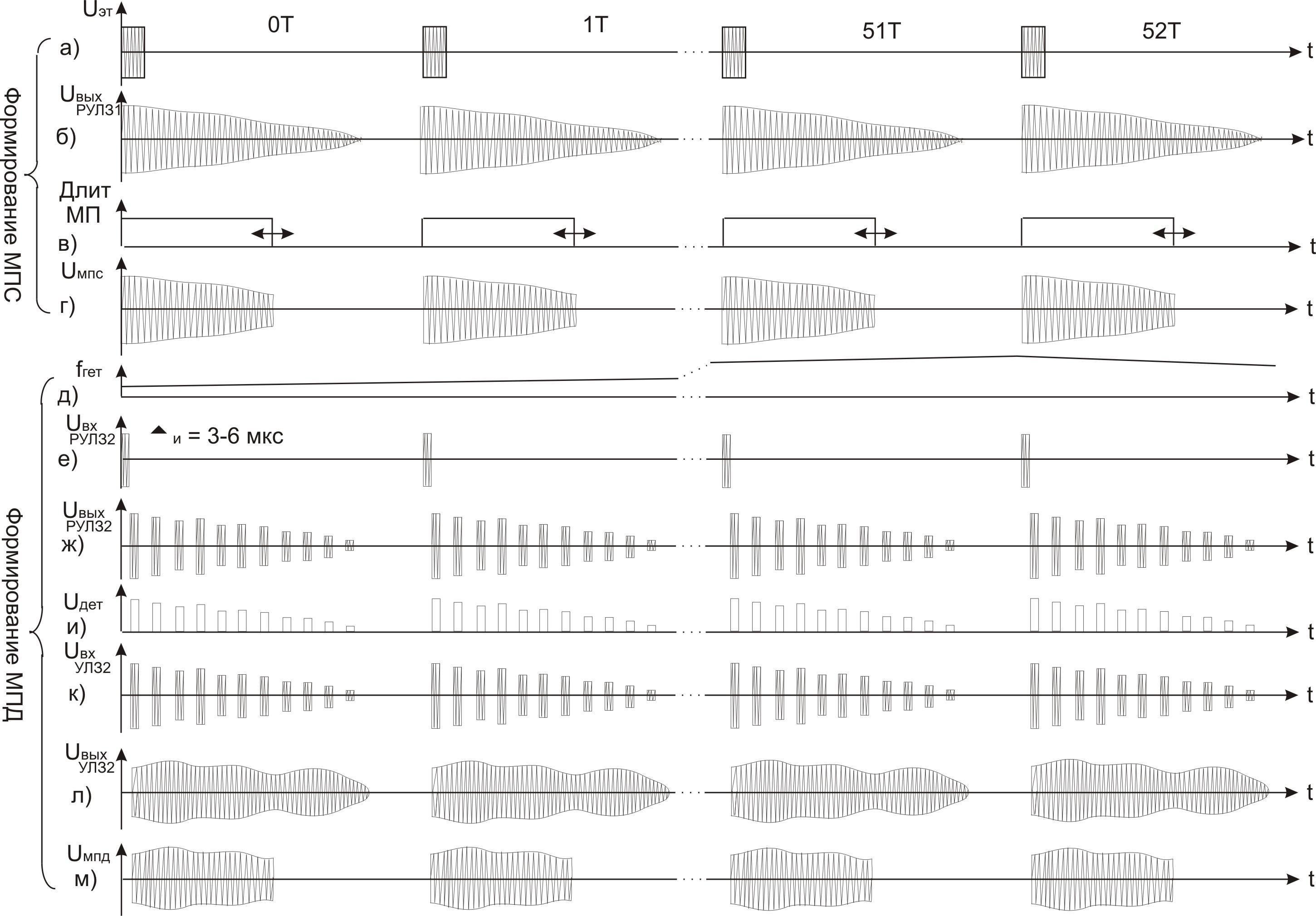
Рис.7.7. К пояснению функционирования имитатора отражений от местных предметов
При включении режима МПД сформированные сигналы с выхода ЭП1 поступают на управляемый аттенюатор (модулятор), на управляющий вход которого поступают модулирующие импульсы, определяющие местонахождение МПД.
Модулирующие импульсы формируются из отклика РУЛЗ2 на импульсные сигналы, частота заполнения которых медленно меняется от импульса к импульсу. Период и девиация качания частоты гетеродина ГЕТ1 выбраны так, что за время 200-300 мс (время, за которое антенна при вращении проходит сектор в две-три ширины ДНА) отклики РУЛЗ2 на вырезки из генерируемых им колебаний (рис.7.7, ж) были не коррелированными. Если параметры РУЛЗ2 выбрать так, чтобы вырезки длительностью 12-18 мкс, формируемые ключом Кл1, при их многократном отражении от граней кристалла не сливались, то через 200-300 мс их положение на временной оси (рис.7.7, ж) будет уже независимым. Этим обеспечивается формирование местоположения дискретных местных предметов, которое плавно изменяется с изменением азимута.
После детектирования отклика РУЛЗ2 и усиления в регулируемом УНЧ1 (рис.7.7, з) сигналы подаются в качестве модулирующих на управляемый аттенюатор (модулятор), который обеспечивает формирование соответствующих вырезок из сигнала МПС (рис.7.7, и). Эти вырезки подаются затем в систему оптимальной фильтрации (блок 053-04) на формирующую линию УЛЗ2, которая формирует ФКМ-отклики на каждое воздействие. Поскольку длительность ФКМ-сигнала составляет 43 мкс, то выходной сигнал УЛЗ2 (рис.7.7, к) будет представлять собой сплошной отклик. Раздельно дискретные местные предметы, положение которых по дальности определяется модулирующими импульсами (рис.7.7, и), будут теперь наблюдаться только после сжатия сигналов в системе ОФ.
Регулировка «ДЛИТ. МПД» определяет эффективную протяженность отдельных радиоимпульсов, при этом меняется степень перекрытия откликов на выходе РУЛЗ2 и, следовательно, плотность расположения модулирующих импульсов. Изменяя коэффициент усиления УНЧ1 «Плотн МПД» можно так же изменять плотность расположения модулирующих импульсов, но без изменения их длительности.
Имеется возможность формировать сигналы МПД, положение которых по дальности не изменяется в зависимости от азимута. Для этого на блоке управления имитатором необходимо выключить тумблер «ФЛЮКТУАЦИЯ МП» и на ГКЧ будет поступать постоянное управляющее напряжение.
Таким образом, тракт имитации отражений от местных предметов обеспечивает формирование сигналов, временные и спектральные характеристики которых близки к отражениям от реальных местных предметов.
В целом технические решения, используемые в блоке имитации пассивных помех, позволяют формировать сигналы, обеспечивающие как имитацию помеховой обстановки, близкой к реальной, так и эффективную проверку системы селекции движущихся целей.