

5.6.2 Оценка вероятности правильного распознавания
Рассмотрим решение задачи распознавания целей по одному признаку Х (например, σц), когда объект может быть отнесен к одному из двух возможных классов: класс I – бомбардировщики, класс II -ракета.
Пусть признак класса I имеет плотность распределения вероятностей f1(X), а класса II – f2(X) (рис.5.37).

Рис.5.37. Вид плотностей распределения вероятностей
Выберем правило, согласно которому можно отнести цели к одному из классов по результату измерения признака.
По аналогии со случаем обнаружения одномерного сигнала таким правилом может быть сравнение измеренного значения Х с выбранным порогом Хo. Если X < Xo -цель относится к классу II, а если X > Xo – к классу I. Если X = Xo, то необходимо продолжать измерение признака X до тех пор, пока не будет принято решение о принадлежности цели к тому или иному классу.
При распознавании возможны ошибки: первого рода – цель класса II принята за цель класса I и второго рода – цель класса I принята за цель класса II. Условные вероятности этих ошибок определяются по следующим формулам (см.рис.5.37)
![]() (5.26)
(5.26)
![]() (5.27)
(5.27)
Для выбора порога Xo воспользуемся критерием минимума среднего риска
M [C] = C = C12 P(I*II) + C21 P(II*I), (5.28)
где C12 и C21 – стоимости ошибок первого и второго рода соответственно; P(I*II) и P(II*I) – вероятности ошибок первого и второго рода соответственно.
Заменяя P(I*II) = P(I*/II) P(II) и P(II*I) = P(II*/I) P(I), (5.29)
получим C = C12 P(II) P(I*/II) + C21 P(I)P(II*/I), (5.30)
или
 (5.31)
(5.31)
где P(I) и P(II) – априорные вероятности наличия в заданном пространстве целей I и II класса соответственно.
Для определения величины Xo, при которой С минимальна, продифференцируем С по Х и приравняем производную к нулю в точке Х = Xo
 (5.32)
(5.32)
откуда
 (5.33)
(5.33)
Приняв допущение о том, что P(I) = P(II), а C12 = C21 и признак Х имеет нормальный закон распределения, получим

![]()
Решая уравнение относительно Xo, определим величину порога
Xo = 0,5 (m1 + m2), (5.35)
так как (Xo – m1)2 = (Xo – m2)2, 2Xo(m1 – m2)= m12 – m22, 2Xo(m1 – m2) = (m1 – m2)(m1 + m2) .
Для вычисления вероятности правильного распознавания необходимо определить вероятность попадания измеренного признака цели класса I в интервал от Xo до ∞ или признака цели класса II в интервал от – ∞ до Xo:
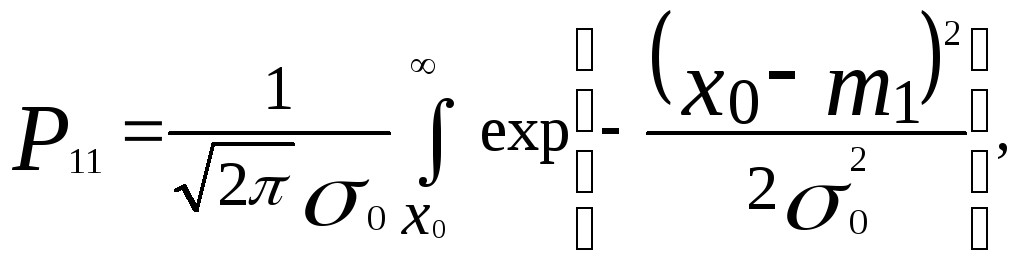 (5.36)
(5.36)
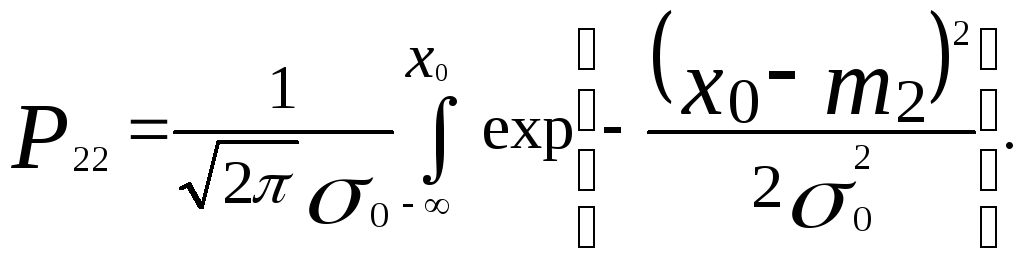 (5.37)
(5.37)
Произведя замену интегрирования (Xo – m1)/so = t и подставляя значение Xo = 0,5 (m1 + m2) получим:


![]() (5.38)
(5.38)
Это выражение справедливо для случая, когда распознавание производится по одиночному измерению величины признака.
Если распознавание производится по результатам нескольких (n) измерений одного признака с квадратом ошибки каждого измерения σi2, то оценка истинного значения признака может производится по средневзвешенному значению измерений
![]()
В этом случае алгоритм распознавания принимает вид:
Если
 ,
то цель относится к классу Ι
,
то цель относится к классу Ι
Если
 ,
то цель относится к классу ΙΙ
,
то цель относится к классу ΙΙ
Если
 ,
то производится повторное измерение
,
то производится повторное измерение
При n – кратном и равноточном измерении одного признака, когда σ1 = σ2 =...= σn = σo дисперсия оценки признака равна
 (5.39)
(5.39)
Вероятность правильного распознавания в этом случае определяется по формуле:
 (5.40)
(5.40)
Из выражения (5.40) следует, чем больше количество измерений, тем выше вероятность распознавания.
Если распознавание осуществляется по к независимым признакам (ценности признаков равны), то вероятность правильного распознавания может быть определена по формуле
 (5.41)
(5.41)
Из формулы (5.41) видно, что для независимых признаков одинаковой ценности (мощности) увеличение их количества равноценно увеличению числа измерений одного признака.
Таким образом, рассмотренная методика позволяет выбрать величину порога и оценить вероятность правильного распознавания.