

5.4 Цифровые измерители координат воздушных объектов
5.4.1 Цифровые измерители дальности и азимута
Методы цифрового измерения дальности.
В цифровых измерителях дальности время запаздывания отраженного сигнала, а соответственно и дальность до цели, определяется путем счета Nм = 2rFм/c масштабных импульсов Uм, имеющих достаточно высокую и стабильную частоту повторения Fм и заключенную на интервале времени от момента tо излучения зондирующего импульса до момента прихода отраженного сигнала (рис.5.19).
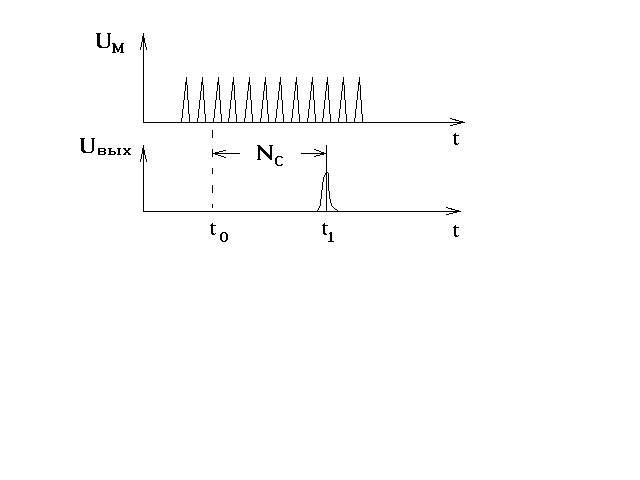
Рис.5.19. Масштабные метки дальности
Каждый импульс синхронизатора отпирает счетчик импульсов, а следующий за ним отраженный сигнал прекращает счет. К моменту излучения очередного импульса передатчика данные счетчика вводятся в систему памяти измерителя и счетчик возвращается в исходное состояние, т.е. позволяет начать новый цикл счета.
Дискретность отсчета дальности составляет Δr = c/(2Fм), а число разрядов счетчика n определяется исходя из максимума дальности и допустимой ошибки
2n ≥ rmax/Δr. (5.10)
Пример. При rmax = 200 км и Δr = 20 м величина rmax/Δr = 104, откуда n = 14.
Устройство, показанное на рис.5.20, позволяет за период повторения измерить дальность только до одной цели. Этот недостаток можно устранить, если триггер закрывать импульсом конца дистанции (ИКД), а в момент прихода импульса цели, текущий код дальности записывается в блок памяти спецвычислителя. При этом процесс счета не прекращается и с приходом другого импульса цели выдается другое значение дальности.
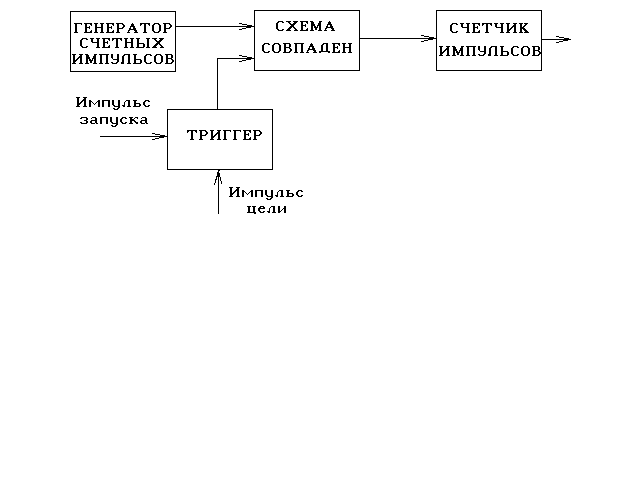
Рис.5.20. Цифровое измерение дальности
Методы цифрового измерения азимута. Азимут цели определяется по центру пакета отраженных сигналов с учетом поправки на задержку, возникающую при определении начала пакета
 (5.11)
(5.11)
где − β н, βк азимут начала и конца пакета импульсов, Δ – поправка на задержку. Начало и конец пакета определяется путем межпериодной логической обработки сигналов. Азимутальные направления βн, βк определяют путем счета МАИ.
Цифровой измеритель азимута может быть реализован с помощью устройства, показанного на рис.5.21, включающего обнаружитель с фиксацией границ пачки, преобразователь угла поворота антенны в цифровой код и схему определения центра пачки.

Рис.5.21. Устройство цифрового измерения азимута
Импульсы начала и конца пачки используются для считывания кода азимута с преобразователя, а измеренное значение азимута цели (оценка азумута) определяется по формуле
β* = (βн + βк)/2, (5.12)
где β н, βк – азимут начала и конца пачки соответственно.
Преобразователь азимута в цифровой код включает датчик масштабной метки «Север», датчик масштабных азимутальных импульсов (МАИ) и m – разрядный двоичный счетчик.
Схема определения центра пачки состоит из сумматора, ключей Кл и Кл' и устройства управления (триггер Т, схемы И1, И2, ИЛИ, ИЛИ2, ЛЗ-1, ЛЗ-2).
Рассмотрим принцип работы устройства. Импульсом «Север» счетчик устанавливается в нулевое состояние, а затем начинает счет импульсов МАИ, приходящих на его вход с датчика МАИ.
Параллельный двоичный код текущего значения азимута подается на ключи Кл. На второй вход этих ключей поступают в качестве коммутирующих сигналов импульсы начала или конца пачки. При приходе с обнаружителя импульса начала пачки Uн из счетчика в сумматор переписывается код азумута βн, а при приходе импульса конца пачки Uк – код азимута βк. В сумматоре оба числа складываются и делятся пополам путем сдвига на один разряд в сторону младших разрядов. В качестве импульсов сдвига используется импульс конца пачки, прошедший через схемы И1, (И2), ИЛИ2 и ЛЗ-1. Время задержки в этой линии выбирается таким, чтобы к моменту сдвига в сумматоре закончились переходные процессы, связанные с образованием суммы. После окончания сдвига с сумматора выдается код азимута цели, и сумматор устанавливается в исходное состояние.
В качестве импульса, управляющего выдачей кода, используется импульс конца пачки, задержанный относительно импульса сдвига на определенное время. Чтобы исключить считывание кодов βн и βк во время переходных процессов в счетчике, связанных с подачей на его вход очередного импульса МАИ, импульсы начала и конца пачки подаются на ключи Кл через схему запрета, на запрещающий вход которой поступают импульсы МАИ. В случае, когда цель находится на нулевом или близком к нему азимуте, вычисления по формуле (3) приводят к ошибке, равной 180о. Азимут центра пачки при этом необходимо определять по формуле
β* = (βн + βк)/2 – 180о. (5.13)
Операцию вычитания можно заменить операцией сложения чисел в обратном или дополнительном коде. Использование дополнительного кода предпочительнее, поскольку нуль в этом коде имеет единственное представление. Переход к вычислению по формулам (5.12) и (5.13) происходит автоматически по следующему критерию: если импульс «Север» находится вне интервала пачки, то вычисление необходимо производить по формуле (5.12), а если внутри - по формуле (5.13).
В первом случае с триггера Т, который устанавливается в единичное состояние импульсом начала пачки, подается разрешающий потенциал на схему И1, а импульс конца пачки, используемый для сдвига суммы, поступает на сумматор через И1, ИЛИ2, ЛЗ-1, что соответствует вычислению по формуле (5.12).
Во втором случае до прихода импульса конца пачки триггер импульсом «Север» перебрасывается в нулевое состояние, и разрешающий потенциал подается на схему И2.
Импульс конца пачки с выхода схемы И2 подается через ИЛИ2, ЛЗ-1 для сдвига суммы, а через ЛЗ-2 - на ключи Кл', обеспечивая подачу на вход сумматора дополнительного кода числа – 180о. Время задержки в ЛЗ-2 выбирается таким, чтобы в сумматоре закончились переходные процессы, связанные со сдвигом.
Оценим ошибку, вносимую данным устройством в суммарную ошибку измерения азимута. Она имеет систематическую и случайную составляющие. Систематическая составляющая обусловлена тем, что импульсы начала и конца пачки выдаются только после выполнения соответствующих критериев. Так например, для алгоритма «k/m – l» имеет место смещение вправо момента фиксации начала пачки на (k – 1) позицию, а момента фиксации конца пачки – на l позиций.
Суммарная систематическая ошибка при этом равна
Δβсист = (k + l – 1)Δ β/2, (5.14)
где Δβ = 360оТп/tз – угловое расстояние между импульсами в пачке; tз – время однократного обзора зоны. Эта ошибка может быть скомпенсирована схемным путем, например, путем установки сумматора в исходное состояние, соответствующее дополнительному коду числа – Δβсист.
Случайная составляющая ошибки обусловлена, главным образом, несимметричностью пропусков сигнальных импульсов на краях пачки, где отношение сигнал-шум мало. Среднеквадратическое значение этой ошибки имеет порядок
σβ = (0,7 – 0,9)Δβ, (5.15)