

6.5.2 Принципы построения основных типов систем вращения
Наиболее простая схема СВА не следящего разомкнутого типа содержит последовательно включенные: электродвигатель, редуктор и реле коммутации.
СВА разомкнутого типа с исполнительным двигателем постоянного тока применяется для сканирования сравнительно легких антенн.
Двигатель постоянного тока через редуктор вращает антенну РЛС. Регулировка скорости вращения осуществляется путем изменения тока якоря двигателя, а реверс антенны – изменением полярности питания (РЛС П-12, П-18). Для повышения точности установки скорости вращения и вывода антенны на заданный азимут подсистема управления вращением должна представлять собой следящую систему по скорости.
Следящая разомкнутая система управления вращением. Данная схема показана на рис.6.38. Оператор, вращая ручку тахогенератора, вырабатывает напряжение пропорциональное скорости вращения штурвала. Это напряжение усиливается и поступает на исполнительный двигатель, который вращает антенну. Подобные схемы применялись в самых первых РЛС.
Вместо тахогенератора (ТГ) можно использовать потенциометр, с помощью которого задается напряжение пропорциональное требуемой скорости вращения антенны.

Рис.6.38. Следящая разомкнутая система управления вращением
Практический пример такой системы управления вращением приведена на рис.6.39. Подобные схемы применены в РЛС типа П-12, П-18 и др.

Рис.6.39. Вариант принципиальной схемы следящей системы разомкнутого типа с потенциометрическим задающим устройством
Преимуществом этой схемы является то, что не требуется постоянного воздействия оператора. Недостатки связаны с низкой точностью вывода антенны на требуемый азимут, кроме того, система не отслеживает заданного азимута.
Следящая система управления вращением замкнутого типа. Вариант построения такой схемы представлен на рис.6.40.

Рис.6.40. Следящая система замкнутого типа
Основное отличие этой схемы от предыдущих состоит в том, что на валу антенны имеется ТГ, который вырабатывает напряжение, пропорциональное скорости вращения антенны. Это напряжение поступает на обмотку возбуждения электромашинного усилителя (ЭМУ), где вычитается из входного напряжения управления.
В таких системах уменьшены ошибки по отслеживанию заданной скорости, увеличена реакция на изменение задающего воздействия. Вместе с тем, по-прежнему эта система имеет максимально большую статическую ошибку слежения (т.е. вообще не отслеживает заданного азимута).
СВА разомкнутого типа с исполнительным двигателем переменного тока в основном применяется для РЛС кругового обзора с постоянными скоростями вращения. В таких СВА двигатель, питаемый от сети, через редуктор вращает антенну РЛС. Изменение скорости вращения производится либо переключением схемы питания двигателя (треугольник, звезда), либо изменением передаточного числа в редукторе. При необходимости установки антенны на заданный азимут, например в целях ориентирования, используется ручной привод вращения (РЛС П-15, П-19, 35Н6, П-35М и др.).
В ряде случаев в РЛС РТВ необходимо обеспечить синхронное вращение нескольких антенных систем (РЛК 5Н87, НРЗ в РЛС 55Ж6 и др.). В радиовысотомерах необходимо устанавливать антенну на заданный азимут с высокой точностью. Для этого подсистема управления вращением должна представлять собой следящую систему, отслеживающую заданный азимут (следящая система по положению).
Следящие системы, отслеживающие заданный азимут.
Простейшая следящая система такого типа состоит из сельсин-датчика (СД) и сельсин-приемника (СП), на которые подается опорное напряжение.
Если требуются большие мощности для отслеживания задаваемого азимута, то применяют схемы с ЭМУ и электродвигателями (рис.6.41).
В этой схеме при появлении рассогласования между СД и СП появляется напряжение рассогласования, которое поступает на УМ, усиливается и далее на обмотку возбуждения ЭМУ, который вырабатывает напряжение управления двигателем постоянного тока, а он вращает СП в сторону уменьшения рассогласования.
В данной схеме ТГ1 и ТГ2 улучшают параметры слежения, обеспечивая подавление переколебательных процессов и уменьшение ошибок слежения.

Рис.6.41. Следящая система с замкнутым циклом управления, усилителем мощности и обратными связями
Двухканальная замкнутая следящая система. Дальнейший путь повышения точности слежения это применение 2-х канальных систем (рис.6.42).
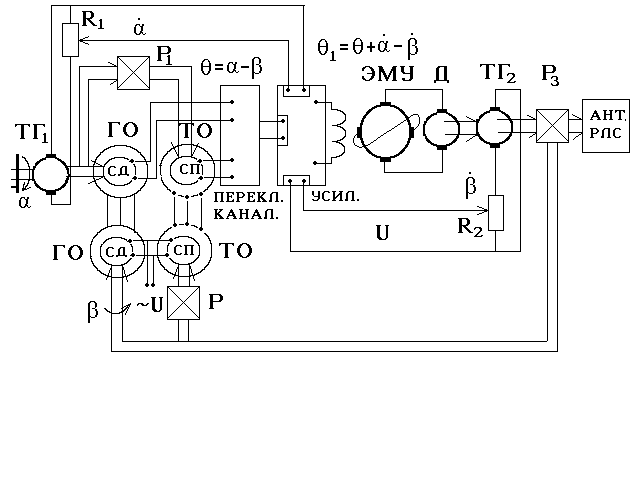
Рис.6.42. Двухканальная следящая система с замкнутым циклом управления и обратными связями
Схема практически идентична схеме, показанной на рис.6.41, за исключением наличия переключателя каналов: при больших углах рассогласования (на СД грубого отсчета (ГО) большое напряжение) подключен канал ГО, при малых – канал точного отсчета (ТО).
Особенности схемы заключаются в том, что для исключения ложного нуля коэффициент передачи ТО должен быть нечетным, тогда схема принципиально не сможет «схватить» на рассогласование 180°.
Подобная следящая система применена в азимутальном приводе вращения радиовысотомера ПРВ-16.
Один из вариантов СВА замкнутого типа с исполнительным двигателем постоянного тока приведен на рис.6.43. Она представляет собой систему автоматического регулирования и может работать в режимах ручного управления, кругового обзора и секторного обзора.

Рис.6.43. СВА замкнутого типа с исполнительным двигателем постоянного тока
В зависимости от режима работы напряжение рассогласования, заданное сельсинами, через переключатель каналов ГО/ТО подается на дискриминатор, который измеряет величину и направление рассогласования. Усиление сигнала ошибки системы осуществляется несколькими каскадами усиления. Основное усиление по мощности осуществляется электромашинным усилителем (ЭМУ), выходной сигнал которого подается на питание якоря исполнительного двигателя, который через редуктор вращает антенну в направлении уменьшения угла рассогласования, а также устанавливает СП в положение, согласованное с СД.
Если в разрыв задающих сельсинов включен дифференциальный сельсин, то изменение положения его ротора по программе маломощной подсистемой управления приведет к программной отработке сигнала рассогласования на выходе СП. Для повышения точности отработки система делается двухканальной с переключением на канал точного отсчета (ТО) после отработки сигнала ошибки каналом грубого отсчета (ГО). Для улучшения устойчивости система охватывается обратными связями по скорости и ускорению. Подобная СВА нашла применение в радиовысотомерах, например, ПРВ-17.
Вариант СВА замкнутого типа с гидросиловым приводом представлен на рис.6.44. Подобная система применяется для синхронного вращения тяжелых антенных систем (например, РЛК 5Н87).
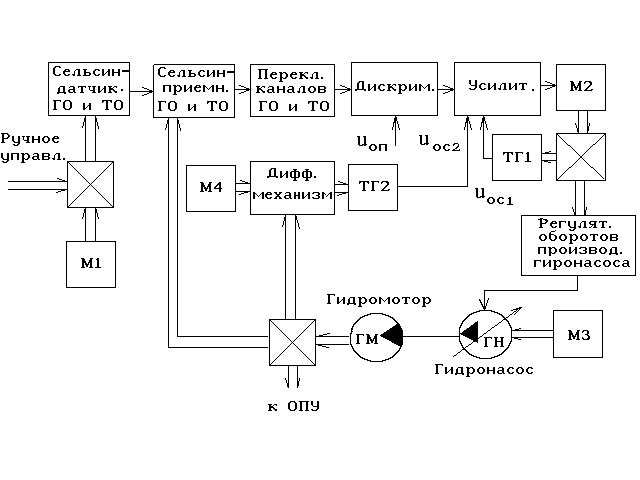
Рис.6.44. СВА замкнутого типа с гидросиловым приводом
Гидропривод представляет собой пару мотор-насос с регулируемой производительностью. В зависимости от количества прокачиваемой в единицу времени жидкости, изменяется скорость вращения гидромотора.
Принцип работы системы заключается в следующем.
Двигатель М1 через редуктор вращает ротор СД, задавая необходимую скорость вращения. Усиленное напряжение рассогласование с сельсин трансформатора поступает на двигатель М2, управляющий регулятором производительности гидронасоса (ГН).
В исходном состоянии производительность ГН равна нулю, двигатель М3 работает на холостом ходу. Под действием сигнала ошибки с М2 регулятор устанавливает некоторую скорость прокачки жидкости, что приводит во вращение вал гидромотора и, через редуктор, антенную систему. Одновременно проворачивается и ротор сельсин-трансформатора, что приводит к снижению напряжения рассогласования до величины нечувствительности в системе и установке регулятора производительности в фиксированное положение.
Для стабилизации работы СВА используется обратная связь по скорости с помощью дифференциального механизма, выходной вал которого вращает с помощью синхронного двигателя М4 тахогенератор ТГ2, и обратная связь по ускорению с тахогенератора ТГ1.
В режиме ручного управления двигатель М1 с редуктором в сцепление не входит, а положение СД задается ручкой ручного управления.
Гидросиловые СВА имеют две-три скорости вращения и для повышения точности слежения также выполняются двухканальными.
Вариант СВА комбинированного типа приведен на рис.6.45.
Подобная система применяется в РЛС с тяжелыми антеннами при значительном потреблении энергии например, РЛС П-14, 5Н84А, 55Ж6).
Система работает в трех режимах: пуск, круговое вращение и установка на заданный азимут.
В режиме пуска СВА разомкнута. Разгон антенны осуществляется путем включения исполнительного двигателя постоянного тока, который приводится во вращение при подаче на него усиленного ЭМУ постоянного напряжения Uпуск. Электромагнитные муфты ЭММ1 и ЭММ2 включены. Через ЭММ1 асинхронный двигатель вращает ЭМУ, а через ЭММ2 и редуктор усилие исполнительного двигателя передается на вал системы.
После разгона антенны (перехода в режим кругового вращения) ЭММ1 и ЭММ2 отключаются и включаются ЭММ5 и ЭММ5 низкой скорости вращения. Для перехода на более высокую скорость вращения включается ЭММ4, а ЭММ3 отключается.
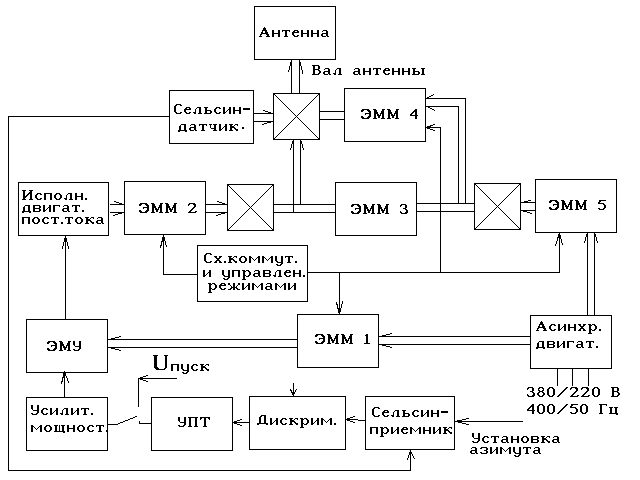
Рис.6.45. СВА комбинированного типа
В режиме установки антенны на заданный азимут СВА коммутируется как замкнутый следящий привод по положению с исполнительным двигателем постоянного тока. При этом включены ЭММ1, ЭММ2 и цепи сельсинов.