

4.4 Технические решения, обеспечивающие помехозащиту рлс методами пространственной и поляризационной селекции
4.4.1 Уменьшение угловых размеров главного лепестка дна и снижение уровня боковых лепестков
Пространственная селекция является универсальным методом защиты от помех, так как обеспечивает защиту от любых типов помех, источники которых не совмещены по угловым координатам с источником полезных сигналов. Она реализуется: уменьшением угловых размеров главного лепестка ДН приемной антенны; снижением уровня боковых лепестков ДН приемной антенны; уменьшением уровня приема в направлениях на постановщики активных помех.
В первом случае затрудняются условия создания АШП по главному лепестку ДНА в режиме внешнего прикрытия цели, а во втором и третьем случаях − ослабляется мешающее (маскирующее) действие помех.
Ширина ДНА по уровню половинной мощности θо0,5р, как известно, определяется соотношением
θо0,5р = Срас λ/Lант,
где Срас − коэффициент, числовое значение которого лежит в пределах 50-80 и определяется видом амплитудного распределения поля в раскрыве антенны, Lант − линейный размер антенны в соответствующей плоскости, λ − длина волны.
Из данного соотношения следует, что для уменьшения угловых размеров главного луча ДНА необходимо уменьшать рабочую длину волны РЛС и увеличивать размер антенны.
Первый путь приводит к ухудшению помехозащищенности РЛС в условиях пассивных помех и увеличению потерь энергии в атмосфере, а второй − к увеличению массы и габаритов РЛС и снижению ее мобильности.
Кроме того, ширина ДНА зависит от вида амплитудного распределения поля на раскрыве антенны.
Амплитудное распределение общего вида определяется выражением
А(l) = Δ+ (1 − Δ)cos π l/2 ,
где 0 ≤ Δ ≤ 1 (так называемое косинусное распределение на пьедестале). Результаты расчетов отражены в таблице 4.2 и на рис.4.18. Из данных иллюстраций видно, что с переходом от равномерного к спадающему к краям антенны амплитудному распределению расширяется главный лепесток ДН, уменьшается коэффициент направленого действия и снижается уровень боковых лепестков.
Таблица 4.2
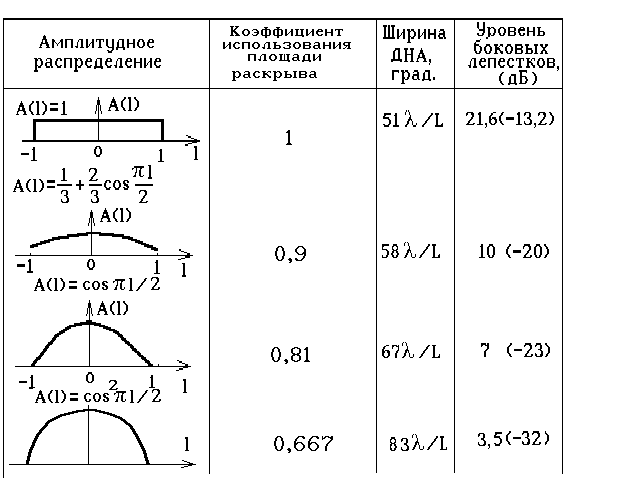
Поскольку при уменьшении угловых размеров ДНА возрастают уровни боковых лепестков, возникает необходимость оптимизации ДН по различным критериям. Например, обеспечить наименьшую ширину ДН при заданном уровне боковых лепестков (и наоборот).
Снижение уровня боковых лепестков. Уровень боковых лепестков ДНА можно уменьшить за счет соответствующего выбора формы распределения поля в раскрыве антенны, путем уменьшения влияния облучателя (использованием антенн с несимметричным раскрывом), уменьшения влияния краевых эффектов (нанесение на кромки раскрыва радиопоглощающего материала) и уменьшения влияния местных предметов.
Как следует из табл.4.2, антенны, у которых амплитуда поля в раскрыве уменьшается к краям до весьма малых значений, имеют наименьший уровень боковых лепестков. Чем резче падает амплитуда, тем ниже уровень боковых лепестков и больше ширина главного луча.
Необходимо, однако, предостеречь от ошибочного вывода относительно возможности достижения на практике очень низких уровней боковых лепестков. При расчете уровней боковых лепестков для приведенных в табл.4.2 распределений поля делалось допущение, что распределение фаз по раскрыву постоянно. Применительно к реальной антенне это допущение может оказаться неверным, так как всегда существуют некоторые неустранимые изменения фазы, обусловленные невозможностью изготовления антенны в соответствии с идеальными требованиями.

Рис.4.18. ДНА при различных видах амплитудного распределения
Имеется определенный практический предел, за которым значительно возрастают трудности получения низких уровней боковых лепестков, даже при значительном уменьшении амплитуды поля на краях раскрыва. Рациональным пределом для понижения уровня боковых лепестков ДН обычных антенн (без учета влияния облучателя и отражений от местных предметов) является величина порядка −35…−40 дБ.
Влияние облучателя на уровень боковых лепестков можно существенно ослабить, применяя параболическую антенну со смещенным облучателем (рис.4.19). Центр облучателя помещен в фокусе параболы, но рупор наклонен относительно ее оси. Большая часть нижней половины параболоида отсутствует. При таком построении антенной системы практически можно считать, что облучатель расположен вне пути распространения отраженной от зеркала энергии, благодаря чему отсутствует искажение ДН за счет затенения раскрыва, а количество энергии, падающей в облучатель, недостаточно для возникновения заметного рассогласования.
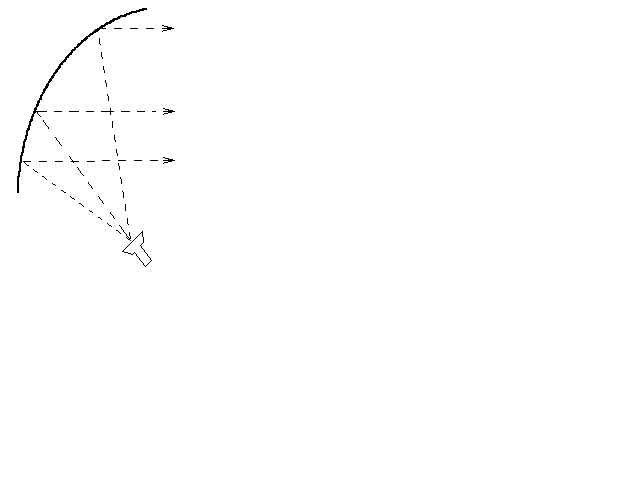
Рис.4.19. Параболическое зеркало со смещенным облучателем
На рис.4.20 представлено семейство зависимостей, иллюстрирующих влияние местных предметов на уровень боковых лепестков. Зависимость 5 соответствует практически идеальной площадке. На других площадках имелись объекты, отражающие и рассеивающие энергию зондирующих сигналов. Из рис.4.20 следует, что отражения от местных предметов оказывают существенное влияние на уровень дальних боковых лепестков и фона. Уровень первых боковых лепестков практически не изменяется.
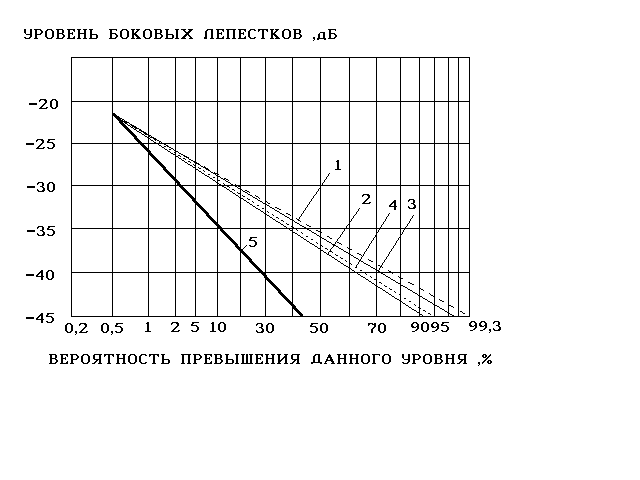
Рис.4.20. Функция распределения уровней боковых лепестков однотипных антенн, установленных на различных площадках
Возрастание уровня дальних боковых лепестков и фона в сложной помеховой обстановке может привести к снижению помехозащищенности
РЛС. Поэтому при выборе позиции для развертывания РЛС необходимо избегать площадок с отражающими и рассеивающими объектами.