

4.10.2 Фазовый детектор
Основными требованиями к ФД в системах СДЦ являются:
перенос спектра входных сигналов в область видеочастот без его расширения;
достаточно большой динамический диапазон.
Рассмотрим примеры фазовых детекторов.
ФД могут быть небалансными и балансными.
Синхронный детектор (небалансный ФД) (рис.4.48,а) позволяет осуществить перенос спектра входного сигнала в область видеочастот без его существенного расширения только лишь при условии, что амплитуда опорного напряжения превышает амплитуду входных сигналов. Это обстоятельство ограничивает в ряде случаев целесообразность использования подобной схемы в системах СДЦ.

а) б)
Рис.4.48. Синхронный детектор (а) и балансный ФД (б)
Балансный ФД (рис.4.48,б) в наибольшей степени отвечает требованиям, которые предъявляются к ФД в системах СДЦ на видеочастоте. Его динамический диапазон значительно выше динамического диапазона небалансного ФД из-за отсутствия необходимости выполнения условия Uоп >> Uс. Наилучшие характеристики среди ФД имеет кольцевой ФД (рис.4.49).

Рис.4.49. Балансный (кольцевой) ФД
Таким образом, основными требованиями к ФД в системах СДЦ являются: перенос спектра входных сигналов в область видеочастот без его расширения и достаточно большой динамический диапазон. Балансные ФД в наибольшей степени отвечают этим требованиям.
4.10.3 Устройство формирования опорного напряжения
Устройство формирования опорного напряжения (УФОН) должно обеспечивать:
исключение случайной начальной фазы зондирующих импульсов при переносе спектров отраженных сигналов в область видеочастот (для выполнения этого требования начальная фаза опорного напряжения fоп должна быть равна случайной начальной фазе зондирующего импульса fсл.з);
возможность подавления сигналов, отраженных от источников ПП, перемещающихся под действием ветра (компенсацию скорости ветра). Для выполнения этого условия необходимо, чтобы допплеровское смещение частоты отражений от ПП ΔFДпп = 0.
Рассмотрим варианты построения УФОН. Структурная схема УФОН для РЛС с автогенератором представлена на рис.4.50.
Первое требование к УФОН в РЛС с автогенератором выполняется путем навязывания когерентному гетеродину (КГ) случайной начальной фазы зондирующего сигнала в момент излучения последнего. Процесс навязывания фазы называют фазированием КГ. Когерентный гетеродин работает на промежуточной частоте. Поэтому сигнал фазирования получают, смешивая ослабленный выходной сигнал в смесителе канала фазирования. Время навязывания КГ новой фазы колебаний (время фазирования) определяется добротностью его колебательной системы, амплитудой фазирующего импульса и величиной расстройки частоты гетеродина относительно частоты фазирующего импульса. По окончании фазирования КГ генерирует колебания, фаза которых в каждом цикле зондирования жестко связана с начальной фазой, излучаемого в пространство высокочастотного импульса передатчика.
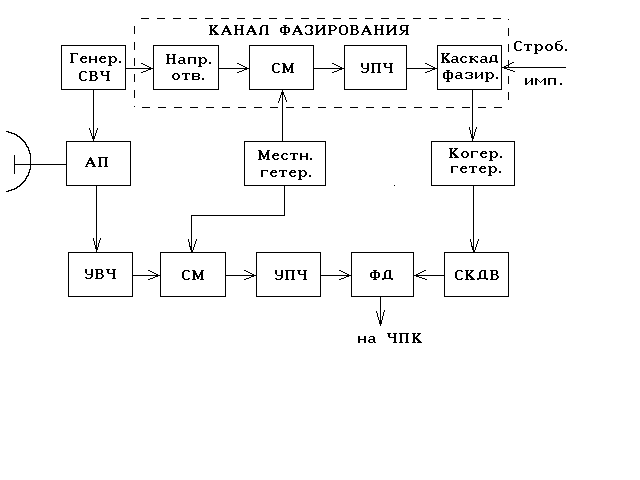
Рис.4.50. Структурная схема УФОН для РЛС с автогенератором
К КГ предъявляются два противоречивых требования. Во-первых, для подавления сигналов, отраженных от источников ПП, требуется высокая стабильность частоты гетеродина. Последнее можно обеспечить только лишь при условии высокой добротности его колебательной системы. Во-вторых, для быстрого и качественного фазирования его колебательная система должна обладать малой добротностью.
Удовлетворить оба эти требования можно двумя способами:
срывом колебаний КГ перед подачей на него фазирующего сигнала;
уменьшением добротности колебательной системы КГ на время действия фазирующего сигнала.
Наиболее часто в РЛС используется второй способ, который технически реализуется путем использования в качестве последнего каскада УПЧ канала фазирования специального усилителя − каскада фазирования (рис.4.50). В отсутствие сигналов фазирования этот каскад закрыт и практически не оказывает шунтирующего действия на колебательную систему КГ.
При поступлении фазирующего сигнала, а в ряде случаев дополнительно и специального стробирующего импульса, каскад фазирования открывается и его выходное сопротивление шунтирует колебательную систему КГ, уменьшая ее добротность. В качестве стробирующего импульса может быть использован задержанный импульс запуска. Стробирование производится с целью исключения фазирования КГ началом и концом фазирующего импульса, т.к. эти части импульса имеют нестабильную фазовую структуру.
Устройство формирования опорного напряжения для РЛС с передатчиком, выполненным по схеме «задающий генератор-усилитель мощности» (рис.4.51), в отличие от рассмотренного выше варианта, может не иметь в своем составе канала фазирования КГ, если КГ используется одновременно и в канале задающего генератора.
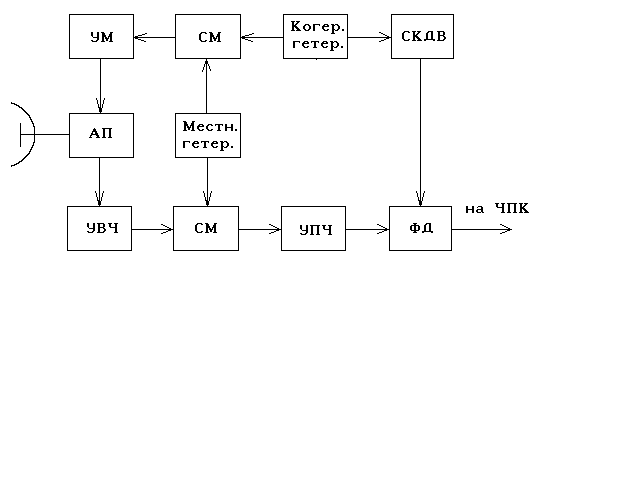
Рис.4.51. Формирование опорного напряжения в РЛС с передатчиком, выполненном по схеме «задающий генератор-усилитель мощности»
Для выполнения второго требования между КГ и входом ФД включают схему компенсации действия ветра (СКДВ). Эта схема обеспечивает смещение частоты КГ на необходимую доплеровскую поправку.
Принципиально это может быть обеспечено с помощью смесителя путем выделения на его выходе одной из боковых частот, образующихся в результате биения частот КГ fкг и низкочастотного генератора ΔFД.
Схема компенсации действия ветра на основе устройства двухкратного преобразования частоты представлена на рис.4.52.
В СМ1 происходит первое преобразование частоты: на СМ1 подается сигнал КГ и кварцевого генератора с частотой fкв1 = fо + ΔFД. Из ряда частот, образующихся на выходе смесителя, фильтр 1 выделяет частоту fкг − fкв1. В смесителе СМ2 частота преобразовывается вторично. На выходе фильтра 2 выделяется частота
fкг − fо + ΔFД + fо = fкг + ΔFД.
Частота кварцевого генератора в небольших пределах может изменяться путем ручного либо полуавтоматического изменения емкости, шунтирующей кварцевый резонатор.
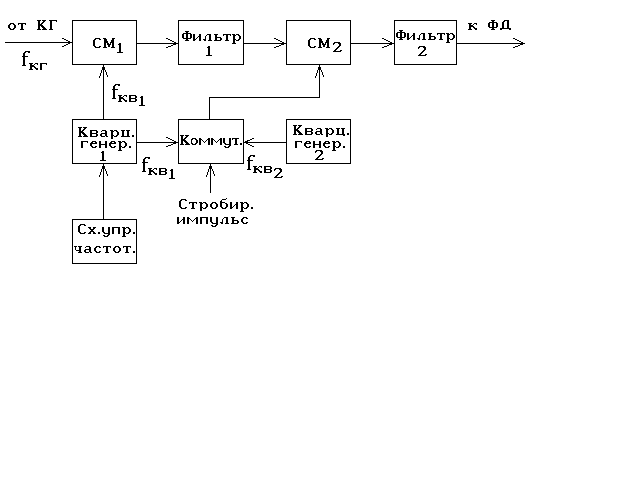
Рис.4.52. Схема компенсации действия ветра на основе устройства двухкратного преобразования частоты
Коммутатор предназначен для выключения СКДВ при подавлении сигналов, отраженных от неподвижных МП. При наличии стробирующего импульса, длительность которого соответствует временной протяженности зоны местных предметов, на управляющем входе коммутатора на смеситель 2 поступают частоты fкг − fкв1 и fкв1, и из комбинационных частот фильтр 2 выделяет частоту fкг, т.е. частотная поправка отсутствует.
Для того чтобы спектральные составляющие сигналов ПП попали в полосы режекции устройства ЧПК, необходимо, чтобы значение частотной поправки удовлетворяло условию
ΔFД = Fпул + FП ,
где Fпул ≤ FП/2 − частота пульсаций сигналов ПП на выходе фазового детектора; FП − частота повторения зондирующих импульсов; k = 0, 1, 2,...
Таким образом, основные требования к устройствам формирования опорного напряжения (УФОН) связаны с исключением случайной начальной фазы зондирующих импульсов при переносе спектров отраженных сигналов в область видеочастот и обеспечение возможности подавления сигналов, отраженных от источников ПП, перемещающихся под действием ветра.