

5.5.7 Полуавтоматическое сопровождение траекторий воздушных объектов
Упрощенная схема системы полуавтоматического сопровождения траекторий целей по двум плоскостным координатам X и Y представлена на рис.5.31.
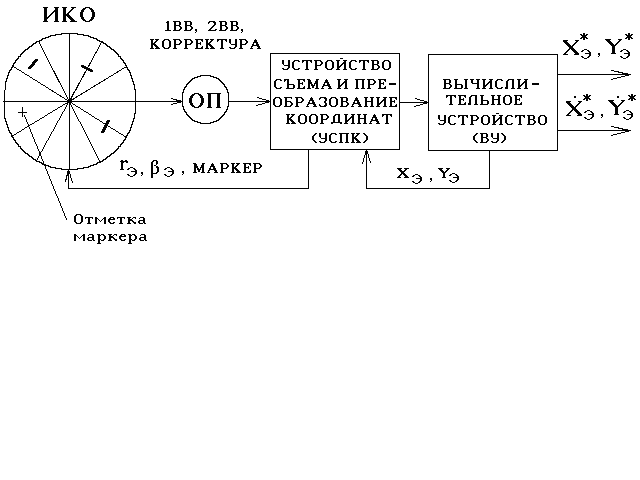
Рис.5.31. Упрощенная схема системы полуавтоматического сопровождения траекторий целей по двум плоскостным координатам
В нее входят: визуальный индикатор (ИКО), устройство съема и преобразования координат (УСПК) и вычислительное устройство (ВУ), предназначенное для расчета параметров и построения траектории движения цели.
Съем координат с экрана индикатора и ввод их в ВУ производится оператором (ОП) путем совмещения электронного маркера (метки), связанного с механизмом устройства съема, с отметками от целей.
Для постановки цели на полуавтоматическое сопровождение необходимы съем и ввод в ВУ двух отметок, привязанных ко времени локации. По данным двух первых вводов определяются составляющие вектора скорости цели и начинается экстраполяция координат:
1) Оценка скорости по двум отметкам в соседних обзорах (критерий «2 из 2») или разнесенных на время (m – 1)∙tобз (критерий «2 из m»):
Vx = (x2 – x1)/(t2 – t1); Vy = (y2 – y1)/( t2 – t1),
где t2, t1 – время локации второй и первой отметок соответственно. За начальную точку траектории принимается (x2, y2) – вторая отметка.
2) Экстраполяция координат осуществляется по линейному закону:
x*эi = x2 + Vx∙(t2 + i∙Δtэ);
y*эi = y2 + Vy∙(t2 + i∙Δtэ),
где Δtэ – период экстраполяции (обычно кратен tобз); i – число периодов экстраполяции относительно t2.
Экстраполированные координаты и составляющие вектора скорости выдаются потребителю и на ИКО.
В момент получения новой отметки оператор наблюдает рассогласование между измеренными и экстраполированными координатами. Если это рассогласование превышает допустимую величину, он вводит поправку (корректуру) путем нового совмещения маркера с отметкой. Корректура используется для уточнения координат и скорости их изменения. Введение корректур является вынужденной мерой, обусловленной отсутствием автоматического сопровождения.
Процесс обработки корректур и уточнения параметров траектории по данным корректур проиллюстрирован на рис.5.32.
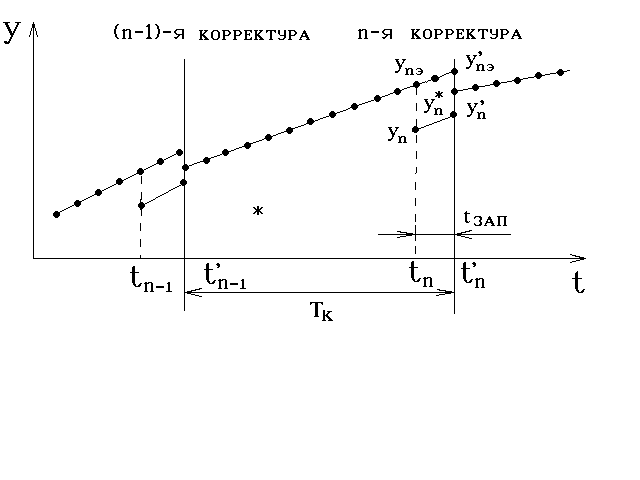
Рис.5.32. Пояснение процесса обработки корректур и уточнения параметров траектории по данным корректур
На рис.5.32 обозначено:
yn – значение координаты y, снимаемое оператором при n-ой корректуре;
ynэ – экстраполированное значение координаты y в момент локации tn;
y'n, y'nэ – соответствующие значения координат на время t'n – момент ввода корректуры;
tзап – время запаздывания ввода корректуры относительно момента локации отметки.
Чтобы осуществить коррекцию траектории по координате y, необходимо вычислить: Δy = yn – ynэ. Но поскольку ввод корректуры происходит с запаздыванием tзап, коррекция траектории будет произведена не в момент tn, а в момент t'n. Поэтому:
Δyn = yn + V*y(n-1)∙tзап – y'nэ,
где V*y(n-1) – сглаженное значение скорости по координате y после ввода (n – 1)-ой корректуры.
Аналогично для координаты x:
Δxn = xn + V*x(n-1)∙tзап – x'nэ.
Время запаздывания tзап вычисляется в УСПК по формуле:
tзап = tобз∙(βа – βк )/2π ,
где βа – азимут антенны в момент ввода корректуры; βк – азимут отметки (корректуры).
Новые сглаженные значения скорости изменения координат вычисляются по формулам:
V*xn = V*x(n-1) + βΔxn/tк;
V*yn = V*y(n-1) + βΔyn/tк.
При этом tк = iк∙Δtэ, где iк – число периодов экстраполяции координат с момента ввода (n – 1)-ой корректуры.
Сглаженные значения координат, отнесенные к моменту t'n , вычисляются по формулам:
x*n' = x*nэ' + α∙Δxn ;
y*n' = y*nэ' + α∙Δyn .
Коэффициенты сглаживания α и β могут устанавливаться оператором.
После нескольких корректур скорость изменения координат, рассчитываемая в ВУ, станет близка к истинной скорости движения цели (при отсутствии маневра). Т.е. наступает установившийся процесс полуавтоматического сопровождения, в котором оператор не участвует. Новое вмешательство оператора (ввод корректуры) потребуется только через некоторое время, когда накапливающаяся от обзора к обзору ошибка превысит допустимую величину (или если цель начнет маневрировать).
Пропускная способность системы полуавтоматического сопровождения определяется частотой ввода корректур по каждой цели. Экспериментально установлено, что хорошо тренированный оператор может одновременно сопровождать 5-8 целей (в зависимости от целевой и помеховой обстановки). Если целей больше, то необходимо увеличить число операторов и УСПК.
Таким образом, системы полуавтоматического сопровождения применяются, если число сопровождаемых целей невелико и оператор (или группа операторов) способен обеспечивать слежение за каждой из них с заданной точностью. Кроме того, полуавтоматические системы используются как дублирующие в случае выхода из строя автоматических систем обработки или при их перегрузке помехами.