

7.5 Блок формирования контрольных сигналов (111-03). Назначение, состав, принцип работы
7.5.1 Назначение и состав блока
Блок 111-03 предназначен для формирования контрольных сигналов КЦ, КМП, ГШ1, а также вспомогательных сигналов СПЛ и ФАП, назначение сигналов, их использование рассмотрено ранее. Все сигналы, кроме ГШ1, вырабатываются из единого когерентного напряжения РЛС Uког, которое подается на блок из системы СДЦ.
В состав блока (рис.7.8) в соответствии с решаемыми задачами входят следующие устройства:
формирователь шумовых помех ГШ1;
формирователь сигналов контрольной цели КЦ;
формирователь сигналов контрольного местного предмета КМП;
формирователь сигналов подстройки линии СПЛ;
формирователь импульсов фазовой и амплитудной автоподстройки ФАП;
устройство коммутации и распределения сигналов.
Рассмотрим общие принципы построения формирователей контрольных сигналов.
7.5.2 Формирователь шумовых помех гш1
Шумовые колебания ГШ1 используются при настройке, калибровке и контроле аппаратуры защиты от активных помех, устройства пеленгации и устройства адаптивной перестройки несущей частоты. В связи с этим формирователь активных шумовых помех ГШ1 должен генерировать прямошумовые колебания в широком динамическом диапазоне с регулируемым распределением мощности по спектру. Этими требованиями определяются состав и структура формирователя ГШ1 (рис.7.8).
Источником шумовых колебаний являются собственные шумы широкополосного усилителя УПЧ1, из которых полосовым фильтром ПФ1 формируется шумовая помеха с равномерным спектром в полосе частот 8 МГц. Поскольку ГШ1 используется при автоматическом контроле РЛС, то УПЧ1 включен постоянно, независимо от включения имитатора, а выход его в тракт коммутируется ключом Кл1 и схемой ИЛИ либо вручную включателем В8, либо автоматически системой контроля (соответствующим сигналом из блока 201-01).
В дальнейшем колебания ГШ1 поступают на устройство имитации спектрального распределения мощности помехи, содержащее усилители УПЧ2, УПЧ3, ключи Кл2 и Кл3, аттенюатор Атт1, выключатели В1-В6, переключатель В7 и схему коммутации. Устройство позволяет в зависимости от положения переключателя В7 («О-ЗАГР-ПРИЦ») формировать заградительную помеху с равномерным распределением мощности по спектру, заградительную помеху с заданным распределением мощности по спектру и прицельную помеху, существующую на одной или нескольких частотах.
При включении переключателя В7 в положении «О» ключ Кл3 закрыт, а ключ Кл2 открыт и мощность ГШ1 не меняется при переходе с одной рабочей частоты на другую (рис.7.9, а), общий уровень мощности помех регулируется управляемым модулятором МОД1 и аттенюатором Атт2 в пределах динамического диапазона приемных трактов РЛС. Тумблеры управления аттенюатором Атт2 выведены на переднюю панель блока. При включении переключателя В7 в положение «ЗАГР» можно сымитировать нестационарную по спектру помеху, дополнительно ослабив с помощью аттенюатора Атт1 мощность ГШ1 при работе станции на указанных тумблерах В1-В6 частотах (на рис.7.8 и 7.9, б такой рабочей частотой выбрана четвертая точка f4). Тумблеры В1-В6 выведены на боковую панель блока. В этом случае при переходе на выбранную частоту (в рассматриваемом случае f4) из блока контроля 202-01 сигнал +5В поступает через замкнутый тумблер (В4) на схему коммутации, в результате чего ключ Кл2 закрывается, а ключ Кл3 открывается и шумы проходят через аттенюатор Атт1, которым задается дополнительное ослабление в пределах 0-10 дБ с дискретностью 1 дБ. Тумблеры управления аттенюатором Атт1 выведены на переднюю панель блока. При включении переключателя В7 в положение «ПРИЦ» ключ Кл3 будет закрыт постоянно, а ключ Кл2 откроется только при переходе на выбранную частоту (f4) и, таким образом, будет сымитирована прицельная помеха только на частоте f4 (рис.7.9, в). В заключении следует отметить, что имитировать нестационарность заградительной или прицельную помеху можно не только на одной какой-то частоте, но и на нескольких рабочих точках произвольно по диапазону, комбинируя положение тумблеров В1-В6, что показано горизонтальными стрелками на рис.7.9, б, в.
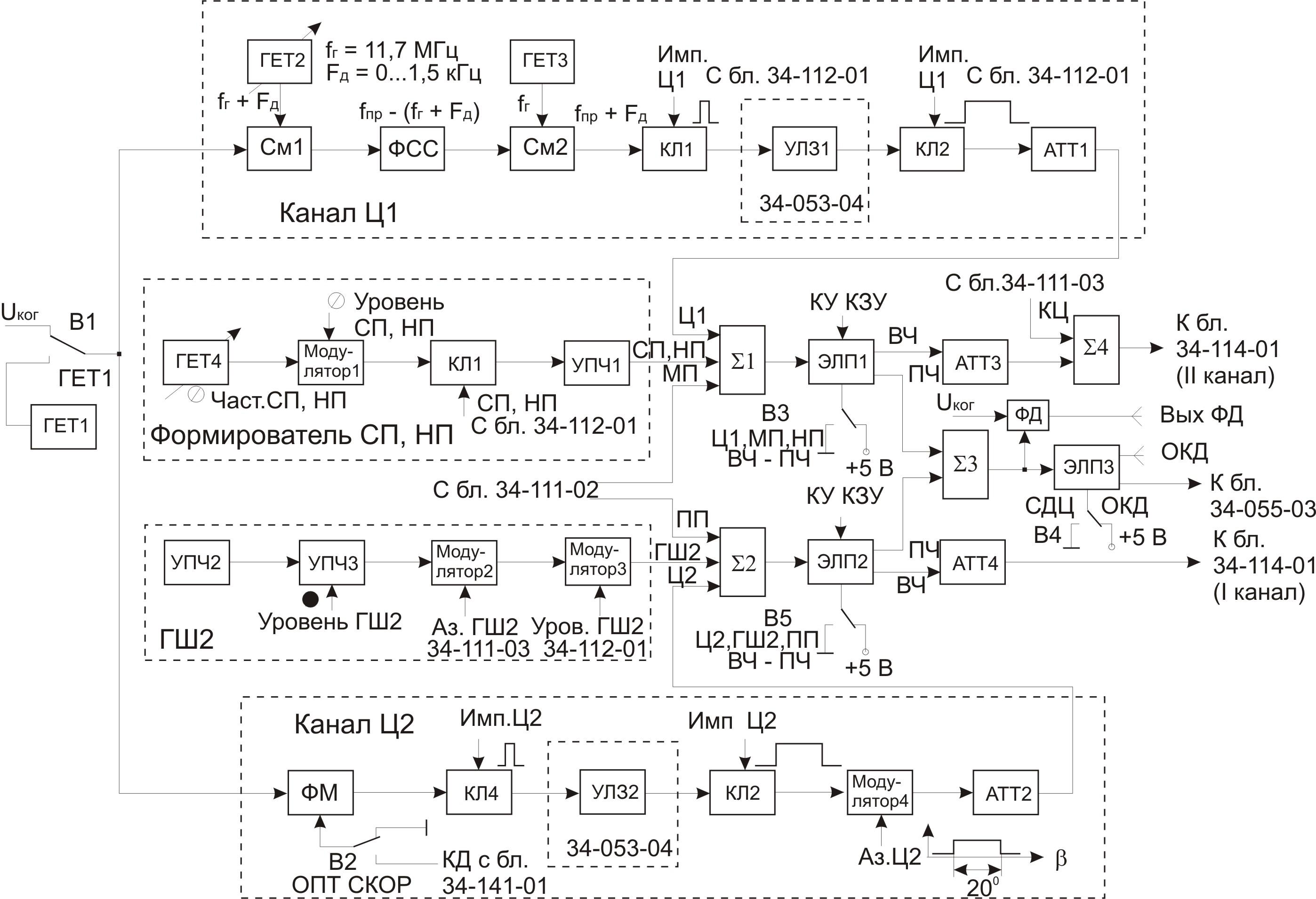
Рис.7.8. Структурная схема блока имитации эхо-сигналов воздушных объектов и помех (34-111-01)
Сформированные шумовые колебания ГШ1 с требуемым распределением мощности по спектру поступают на модулятор, который автоматически регулирует уровень помехи в режиме автоматического контроля в пределах 0-40 дБ. Далее через аттенюатор Атт2 колебания ГШ1 подаются на электронный переключатель ЭЛП1, обеспечивающий выдачу их либо на промежуточной частоте (выход ПЧ) через делитель 1:2 на выход блока, либо на устройство коммутации и распределения (выход ВЧ). Переключение выходов осуществляется тумблером В9, выведенным на переднюю панель блока. Выход ПЧ является вспомогательным и необходим при проведении настроек и регулировок блоков обработки сигналов на промежуточной частоте.
Выход ВЧ является основным и обеспечивает подачу сформированных шумов ГШ1 на высокочастотные входы приемных трактов РЛС.
Таким образом, формирователь шумовых колебаний ГШ1 обеспечивает имитацию прицельных и заградительных активных шумовых помех в рабочем диапазоне частот РЛС.