

5. Обработка радиолокационной информации
5.1 Первичная обработка радиолокационной информации
Совершенствование радиотехнических систем различного назначения и РЛС, в частности, расширение их функциональных возможностей, основанные на развитии микроэлектроники и цифровой техники, привело к широкому привлечению для решения широкого круга задач синтеза и анализа систем обработки радиолокационных сигналов нового для них математического аппарата, появившегося при отходе от традиционного пути построения систем обработки − использование элементов на основе цифровой техники.
Рассмотренные в первой части курса лекций модели сигналов целей имели непрерывное множество значений. При этом оптимизация процесса обнаружения таких сигналов (заметим это одна из первых и важнейших задач обработки радиолокационных сигналов из совокупности задач: обнаружение, измерение, разрешение и распознавание) приводила к оптимальным обнаружителям, которые реализуются при помощи аналоговых устройств.
Однако это не единственный путь и на определенном этапе обработки можно выполнить дискретизацию сигналов по времени и по амплитуде аналого-цифровым преобразователем (АЦП) и проводить дальнейшую обработку цифровыми устройствами. При этом весьма повышаются возможности системы обработки радиолокационных сигналов.
5.1.1 Задачи, решаемые при обработке рли
В теории радиолокации основные этапы и связанные с ними задачи радиолокационного наблюдения и обработки РЛИ сводятся к следующим процедурам:
1. Обнаружение целей, под которым понимается процесс принятия решения о наличии целей на входе приемного устройства РЛС с допустимой вероятностью ошибочного решения.
2. Измерение координат − позволяет оценить координаты целей и параметры их движения с допустимыми погрешностями.
3. Разрешение целей − заключается в выполнении задач обнаружения и измерение координат одной цели при наличии других, близко расположенных по дальности, направлению, скорости и т.д.
4. Распознавание целей − дает возможность установить некоторые характерные признаки цели: точечная она или групповая, движущаяся или неподвижная и т.д.
Оптимальные алгоритмы обнаружения и оценки параметров, как правило, заключаются в накоплении сигнала за длительность входной реализации, сравнении с порогом и измерении параметров сигнала.
В соответствии с выводами статистической теории радиолокации оптимальный приемник должен выполнять следующие операции (рис.5.1):
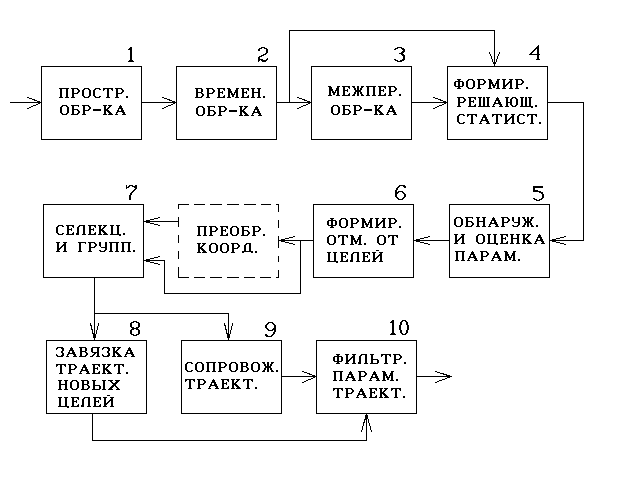
Рис.5.1. Основные этапы обработки РЛИ
1) пространственная обработка когерентных сигналов многоэлементной антенной системой;
2) временная внутрипериодная обработка когерентных сигналов, включающая нелинейную обработку (ограничение, логарифмирование и т.д.) и согласованную фильтрацию или корреляционную обработку;
3) межпериодная компенсация коррелированных помех, обусловленных отражением от местных предметов, гидрометеоров и специальных отражателей (дипольных отражателей);
4) накопление сигналов и формирование некоторой статистики о принимаемых сигналах на основе, которой принимается решение об обнаружении и оцениваются параметры сигнала;
5) пороговое испытание решающей статистики и реализация алгоритмов обнаружения и оценки параметров сигналов;
6) формирование отметок обнаруженных целей;
7) селекция и группирование новых отметок по принадлежности к траекториям сопровождаемых и вновь поступающих на сопровождение целей;
8) завязка и предварительное определение параметров новых траекторий;
9) привязка новых отметок к траекториям целей, находящихся на сопровождении;
10) фильтрация параметров траекторий целей в процессе решения задач завязки и сопровождения траекторий, а также в интересах потребителей информации.
Операции 1-2 составляют этап внутрипериодной пространственно-временной обработки одиночных когерентных сигналов.
Операции 3-6 составляют этап межпериодной обработки совокупности сигналов, отраженных от каждой цели в процессе равномерного сканирования луча антенны в зоне обзора.
Операции 7-10 составляют этап межобзорной обработки РЛИ о траекториях сопровождаемых целей.
Таким образом, имеет место жесткая связь последовательности обработки РЛИ по этапам. Практика показывает, что реализация алгоритмов обработки РЛИ в аналоговой форме имеет существенные недостатки. Для их устранения применяют цифровую обработку РЛИ. Проведем сравнительную характеристику систем аналоговой и цифровой обработки информации.