

5.5.3 Оценка параметров траекторий
5.5.3.1 Сглаживание и экстраполяция при вторичной обработке
На всех этапах вторичной обработки радиолокационной информации решаются задачи нахождения оценок r*(tj) параметров траектории по выборке наблюденных координат x(ti), i = 1...n (фильтрация параметров траектории). При этом различают оценку параметров:
отнесенную к моменту tj = tn получения последнего измерения – сглаживание параметров траектории;
в упрежденной точке tj > tn – экстраполяция параметров траектории;
в точках, находящихся внутри интервала наблюдения 0 ≤ tj < tn – интерполяция параметров траектории.
При решении задач оценки параметров принципиальное значение имеет способ представления процесса изменения оцениваемых параметров траектории цели во времени.
Модель движения летательного аппарата может быть задана временным полиномом:

где коэффициенты ао, а1, а2,... имеют смысл соответственно начальной координаты ао и ее производных – первой а1 (скорость), второй а2 (ускорение) и т. д.
Для неманеврирующей цели можно записать r(t) в виде
r(t) = ао + а1·t ,
а на участках маневра
Величины аi являются неизвестными параметрами трассы и подлежат оценке при вторичной обработке.
Выражение для сглаженной трассы r*(t) получаем после подстановки полученных оценок аi* во временной полином:

5.5.3.2 Алгоритм фильтрации параметров траектории по методу максимального правдоподобия
Для случая, когда помехи в соседних обзорах некоррелированы, измерения координат РЛС равноточны и используется гипотеза о равномерном прямолинейном движении цели, на основе метода максимального правдоподобия можно получить следующие выражения для оценок:
1. Сглаженное значение (оценка) координаты на момент наблюдения
![]()
где
![]() – весовая функция оценки координаты.
– весовая функция оценки координаты.
2.Оценка скорости по координате r
где
![]() – весовая
функция оценки скорости; Тп
= tобл
i+1 – tобл
i
– период обзора.
– весовая
функция оценки скорости; Тп
= tобл
i+1 – tобл
i
– период обзора.
3. Оценка координаты экстраполированной на l обзоров
![]()
![]() –весовая
функция оценки координаты, экстраполированной
на l
обзоров для i-го
момента времени.
–весовая
функция оценки координаты, экстраполированной
на l
обзоров для i-го
момента времени.
В частности, при экстраполяции на один обзор (l = 1)
![]()
Аналогичными будут выражения и для оценок другой плоскостной координаты β и скорости ее изменения Vβ.
По полученным сглаженным значениям Vr и Vβ можно определить и сглаженное значение курса цели Q*.
Как видно из приведенных выражений, для получения сглаженных значений координат и параметров трассы используется со своими весовыми коэффициентами информация о координатах всех предыдущих отметок от цели.
Упрощенная структурная схема для реализации алгоритма оценки одного из параметров линейной трассы при фиксированной выборке измеренных значений координаты изображена на рис.5.27. Оценка параметров осуществляется в РЛС, как правило, с помощью спецвычислителя.
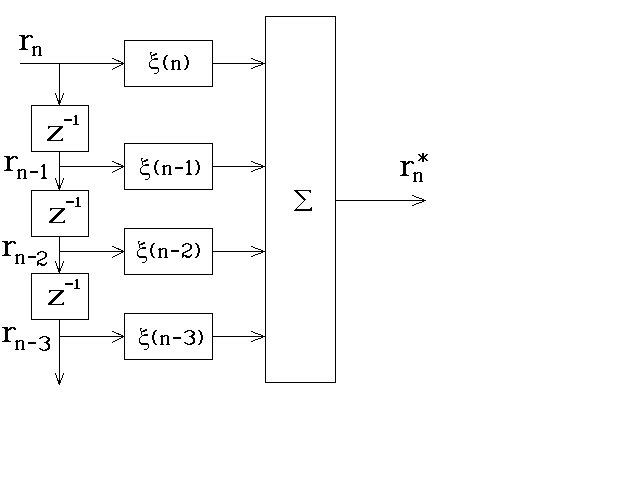
Рис.5.27. Упрощенная структурная схема для реализации алгоритма оценки одного из параметров линейной трассы при фиксированной выборке измеренных значений координаты
Аналогичным способом можно найти оптимальные алгоритмы оценки параметров и координат при квадратичной сглаживающей функции, т.е. при рабочей гипотезе о криволинейном движении цели. В этом случае дополнительно должна осуществляться еще и оценка ускорения цели.
Устройство оценки координат и параметров по структуре получается таким же, однако усложняется процедура вычисления весовых функций.
В процессе автосопровождения реальных целей прямолинейные и криволинейные участки трассы чередуются случайным образом.
Поэтому в системе автосопровождения необходимо иметь устройство, которое в соответствии с установленным критерием должно производить выбор гипотез о характере движения цели и переключение алгоритмов ее сопровождения. В задачу этого устройства входит своевременное обнаружение факта изменения характера движения цели, т.е.обнаружение начала и конца маневра.
Так как на участке маневра условие соответствия реальной трассы движения цели и принятой гипотезы движения в алгоритме сглаживания нарушается, то появляются динамические ошибки сопровождения. Эти ошибки могут быть использованы в качестве исходного сигнала для обнаружения маневра цели. В соответствии с общим подходом, вытекающим из теории статистических решений, используют не сами ошибки, а их квадратичную форму (или модульное значение ошибок), которую сравнивают с некоторым порогом, выбранным исходя из допустимой вероятности ложного обнаружения маневра.
Приведенное устройство (рис.5.27) оптимальной оценки координат и параметров трассы оказывается весьма сложным в реализации, так как, во-первых, требуется запоминать всю предысторию движения цели (большое число отметок), во-вторых, с появлением каждой новой отметки нужно изменять значения всех весовых коэффициентов и, в третьих, необходимо иметь отдельные, хотя и однотипные, устройства для оценки каждой координаты и параметра.