

6.3.2 Функциональная схема индикатора измерения высоты
Функциональная схема индикатора измерения высоты представлена на рис.6.26. Эпюры напряжений и токов в отмеченных цифрами точках, приведены на рис.6.27.
С помощью переключателя П канала разверток индикатор может переключаться для работы в режиме дальность-высота или в режиме дальность-угол места. В последнем случае устройство формирования развертки высоты отключается от усилителя тока развертки. Вертикальная развертка создается путем усиления напряжения Usinε (эпюра 2), поступающего от датчика угла места, связанного с антенной.
Формирование меток высоты. Существуют два основных способа формирования меток высоты:
сравнения напряжения высоты с фиксированными уровнями;
формирования меток высоты с помощью масштабных отметок дальности.
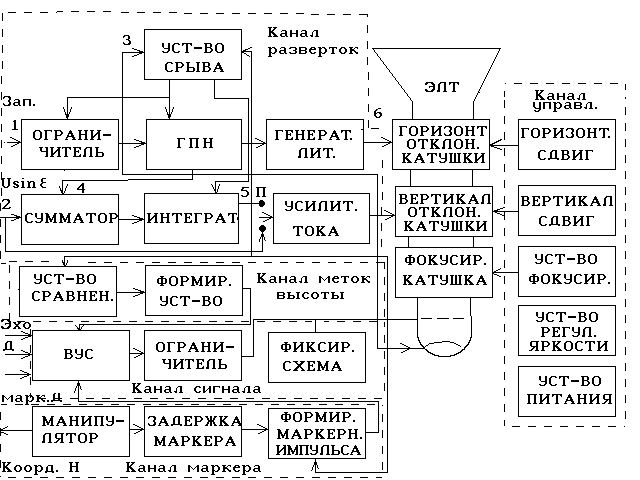
Рис.6.26. Функциональная схема ИИВ
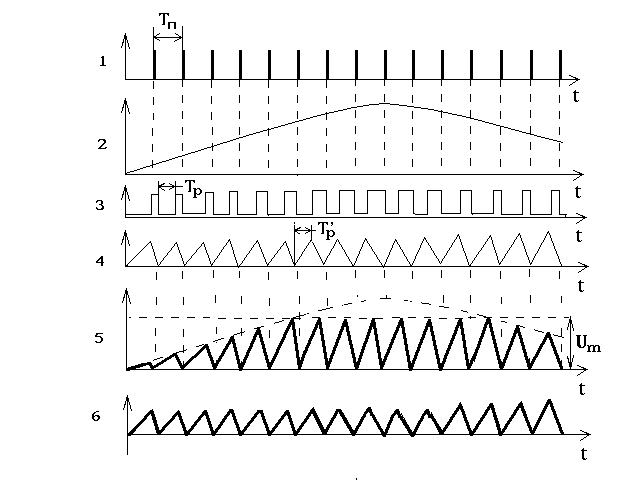
Рис.6.27. Эпюры напряжений к функциональной схеме ИИВ
При первом способе для формирования меток высоты используется напряжение развертки высоты, являющееся измерительным напряжением. Каждому напряжению высоты соответствует определенная высота, поэтому для формирования меток высоты достаточно подать его на схему сравнения с заданными фиксированными уровнями напряжения, а в моменты достижения соответствующих уровней формировать короткие импульсы.
Если последние через ВУС индикатора подать на модулятор трубки, то на экране будут высвечены точки, отстоящие от начала шкалы высоты на заданные расстояния. Поэтому функциональную схему канала формирования меток высоты можно представить так, как это показано на рис.6.28,а. Функционирование ее поясняется рис.6.28,б. В течение времени формирования развертки высоты при каждом значении ε = const формируется серия коротких импульсов в моменты достижения в моменты достижения Uрн фиксированных значений U1, U2, U3,... и высвечиваются соответствующие им точки на экране трубки. При слитном растре (при качании антенны) на экране образуются светящиеся горизонтальные линии H = const.
Ошибки формирования меток высоты целиком зависят от ошибок формирования напряжения высоты, поэтому должны быть приняты меры снижения их. В частности, для формирования напряжения высоты применяют синусные потенциометры высокой точности, которые создают напряжение Usinε, пропорциональное синусу угла места. Кроме того, в канале формирования меток высоты применяют устройства калибровки, позволяющие контролировать точность формирования меток.

Рис.6.28. Функциональная схема и принцип формирования меток высоты
В качестве схемы сравнения с заданным уровнем напряжения в канале формирования меток могут быть применены устройства, состоящие из схем совпадения на диодах, запертых различными по величине фиксированными напряжениями, которые последовательно отпираются при воздействии напряжения высоты. Однако из-за непостоянства уровня отпирания диодов возникают значительные ошибки формирования меток. Лучшие результаты дают специальные ЭЛТ.
Матричная импульсно-формирующая трубка, применяемая для формирования отметок высоты (например, в ПРВ-13), представляет собой ЭЛТ с электростатическим управлением электронным пучком, у которой вместо экрана имеется матрица в виде тонких металлических нитей, расположенных равномерно впереди коллектора. Схем трубки изображена на рис.6.29.

Рис.6.29. Импульсно-формирующая матричная трубка
Матрица соединена со вторым анодом трубки. В трубке имеется одна пара отклоняющих пластин. Развертка электронного пучка производится поперек нитей матрицы путем подачи на отклоняющие пластины напряжения высоты. Электронный пучок трубки фокусируется в плоскости матрицы. При пересечении электронного пучка нитей матрицы ток коллектор, расположенного за матрицей, уменьшается или прекращается (при диаметре нити не менее диаметра луча ЭЛТ), и на сопротивлении нагрузки Rн выделяется положительный импульс напряжения.
Поскольку нити матрицы расположены равномерно, то для перемещения электронного пучка с любой нити на соседнюю требуются одинаковые изменения отклоняющего напряжения, т.е. нити выполняют роль уровней напряжений, при достижении которых напряжением высоты формируются короткие импульсы. Эти импульсы соответствуют равноотстоящим друг от друга высотам, т.е. являются метками высоты.
Достоинством такого способа является возможность является возможность отображения меток высоты в рабочем режиме ИИВ, т.е. совместно с отображением эхо-сигналов. Недостатком – зависимость точности формирования меток высоты от ошибок формирования напряжения высоты. Кроме того, надежность импульсно-формирующей ЭЛТ невелика.
Формирование меток высоты может быть осуществлено также с помощью меток дальности, имеющих высокую точность (ПРВ-16, ПРВ-17). Для этого в ИИВ формируется развертка высоты без учета кривизны Земли и рефракции (интегратор отключается от ГПН), на вход интегратора подается напряжение, соответствующее ε = 5045,5' (т.е. такого значения ε, что sin ε = 0.1).
При этом получается зависимость между высотой и дальностью H = D∙sin ε = 0,1∙D.
Если при этом через ВУС индикатора подать на модулятор трубки 10-километровые метки дальности, то на экране образуются светящиеся точки, соответствующие однокилометровым меткам высоты. Для формирования линий равных высот необходимо передвигать полученное изображение по экрану трубки с помощью медленной горизонтальной развертки.
Развертка высоты в этом случае представляет собой практически вертикальную линию, так как Тр << Тгор (Тгор – время горизонтальной развертки, равное долям секунды).
При работе ИИВ в режиме нанесения меток высоты эхо-сигналы на него подавать нельзя. Этот режим включается периодически, после чего включается основной режим ИИВ. Благодаря послесвечению ЭЛТ на экране создается совмещенное изображение.
Достоинство такого способа состоит в высокой точности формирования отметок высоты и высокой надежности, что и определяет его широкое использование. К недостаткам следует отнести возможность потери информации в режиме поиска. Однако ввиду того, что у высотомеров основным является режим работы по целеуказанию, этот недостаток не столь существеннен.
Формирование маркера высоты. Маркер высоты на экране ИИВ является подвижной меткой высоты, имеющей вид подвижной линии или же яркой светящейся точки, совмещаемой с отметкой цели.
Для формирования маркера высоты используется тот же принцип, что и при создании меток высоты (рис.6.28), но уровень напряжения Umi не фиксируется, а изменяется с помощью манипулятора положения маркера (рис.6.26). На экране при этом получится подвижная метка высоты. Напряжение, подаваемое на схему совпадения устройства формирования маркера и соответствующее положению манипулятора в момент совпадения маркера с эхо-сигналом, используется как координатное напряжение высоты при полуавтоматическом съеме. Для формирования маркера в виде светящейся точки необходимо обеспечить совпадение задержанного импульса запуска с импульсом высоты.
Таким образом, основными каналами в ИИВ являются: канал разверток; канал меток высоты; канал сигнала; канал маркера; канал устройства управления.