

5.4.2 Измерение доплеровской частоты сигнала
В когерентно-импульсных РЛС для измерения доплеровской частоты применяются многоканальные фильтровые схемы (рис.5.22).
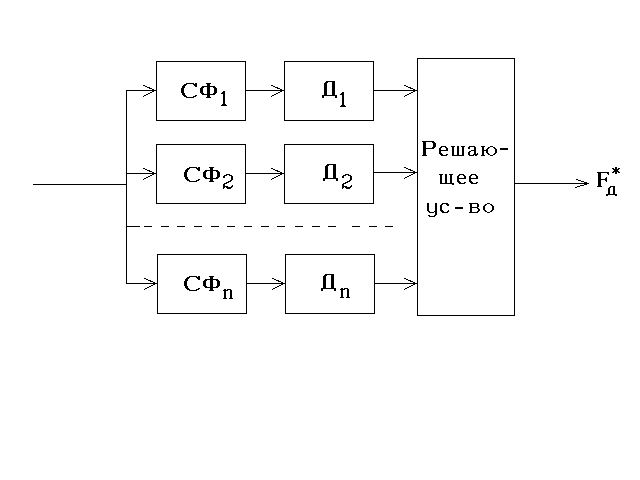
Рис.5.22. Многоканальная фильтровая схема для измерения доплеровской частоты
В такой схеме предусмотрено n частотных каналов с согласованными фильтрами, АЧХ которых перекрываются, и детекторами. Требуемое число каналов определяется по формуле
![]() (5.16)
(5.16)
где ΔFд макс – диапазон, подлежащий изменению доплеровской частоты, определяемый из известного соотношения
ΔFд макс = ± 2 Vr макс/ λ, (5.17)
δFд – разрешающая способность РЛС по доплеровской частоте, которая характеризуется протяженностью сечения тела неопределенности сигнала вдоль оси F.
Оценка Fд* грубо определяется по номеру канала с максимальной амплитудой выходного напряжения.
Для повышения точности оценивания используются выходные напряжения трех соседних частотных каналов с минимальным уровнем сигнала. В этом случае в качестве оценки принимается положение максимума параболической огибающей напряжений выбранных частотных каналов.
Реализация многоканальной схемы осуществляется в частотной области на основе дискретного преобразования Фурье. Анализатор спектра на основе ДПФ можно рассматривать как набор узкополосных фильтров, каждый из которых является согласованным для синусоидального сигнала с частотой, совпадающей с центральной частотой фильтра Fk = k/M·T (k = 0, 1, 2 ...N – 1), полоса пропускания каждого фильтра равна 1/M·T, где М – объем выборки.
Набор главных лепестков АЧХ анализатора спектра на основе ДПФ при М = 8 показан на рис.5.23.
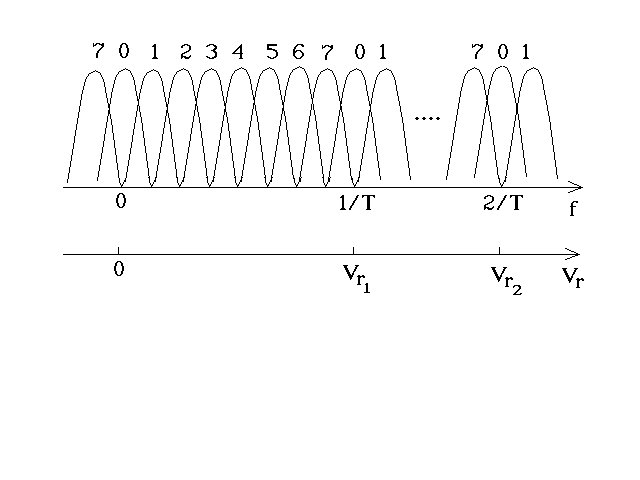
Рис.5.23. Набор главных лепестков АЧХ анализатора спектра на основе ДПФ
Обнаружение и оценка доплеровской частоты принимаемого сигнала производится по номеру канала ДПФ, в котором накопленный сигнал превысил порог обнаружения. Если порог обнаружения превышен в нескольких частотных каналах, производится усреднение или весовое объединение частотных оценок доплеровской частоты. Для ослабления влияния боковых лепестков в эквивалентах АЧХ фильтров используется специальные весовые функции. Дискретное преобразование Фурье при использовании весовой функции
![]()
где A(i) = A(iТ), (I = 0, 1, 2...., N – 1) – весовая функция.
Ошибка измерения Fд*. Максимальное значение ошибка примет в том случае, когда цель имеет такую Vr при которой средняя доплеровская частота колебаний попадает между фильтрами, а за оценку будет принято положение максимума одного из фильтров
 (5.18)
(5.18)
Учитывая, что значение Fд равновероятно распределению между соседними коэффициентами (фильтрами), то за счет дискретного характера отсчета
![]() (5.19)
(5.19)
Фазовый метод измерения радиальной скорости. Метод основан на измерении сдвига фаз сигнала за период посылки (через интервал времени Т) Δφ = ΏДΤ; где ΏД = ω·0·2Vr/c = 2π·Vr /λ = 2π·FД ;
 (5.20)
(5.20)
Из соотношения (5.20) находим
![]() (5.21)
(5.21)
Межпериодный сдвиг фаз Δφ можно определить на выходе фазового детектора в двух последовательных периодах зондирования
φi = arctg Yi/Xi ,
где i – номер зондирования, φi – фаза i-го импульса, Yi, Xi – квадратурные составляющие, т.е.
Δφ = φ2 – φ1.
Однако в силу стробоскопического эффекта по выходу фазового детектора изменения Vr будут неоднозначными с периодом неоднозначности, как следует из (5.21)
![]()
![]()
![]()
где n – номер интервала однозначности.
Для устранения неоднозначности необходимо иметь два независимых измерения одного и того же значения Vr полученных на шкалах с различными элементарными интервалами однозначности
где Т1, Т2 – периоды следования импульсов, f1, f2 – несущая частота, с – скорость света.
В этом случае полный диапазон однозначных измерений Vr будет 1
 (5.22)
(5.22)
Если значения f2, Т2 определяются вобуляцией значений f1 и Т1,т.е.
f2 = f1 + Δf, Т2 = Т1 + ΔТ,
где Δf и ΔТ – соответственно глубина вобуляции несущей частоты и периода повторения, то формулу (5.22) можно записать в виде
Таким образом, для обеспечения требуемого диапазона однозначного измерения Vr необходима вобуляция либо несущей частоты, либо периода повторения зондирующих сигналов, либо несущей и периода повторения одновременно. При этом вобуляция Т или f одинаково влияет на характеристики измерительной системы и в этом смысле эти виды вобуляции равноценны.
Обычно в алгоритме измерения Vr с устранением неоднозначности используется вобуляция только периода повторения импульсов. Период повторения выбирается при этом таким образом, чтобы обеспечить однозначное измерение дальности в соответствии с режимом обзора.
При практической реализации алгоритма измерения радиальной скорости Vr фазовым методом используют не менее 3-х шкал с различными элементарными интервалами однозначности. При этом значения периодов повторения Тi, Тj и разности этих периодов ΔТi,j для каждой пары шкал должны быть кратны, т.е. Тi/ΔТi,j и Тj/ΔТi,j должны быть величинами целыми.
Ошибки измерения радиальной скорости фазовым методом. Определяются ошибками 1-го и 2-го видов.
Ошибки 1-го вида, т.е. ошибки измерения неоднозначных значений Df (по-другому, ошибки при правильно устраненной неоднозначности) имеют непрерывный характер распределения со среднеквадратическим отклонением
 (5.23)
(5.23)
где Vo – элементарный интервал однозначности измерения Vr, σΔφ – ошибка измерения разности фаз.
Ошибки 2-го вида (аномальные ошибки) связаны с неверным устранением неоднозначности. Они имеют дискретное распределение, причем величина дискретности определяется величиной интервала однозначности.
При отношении сигнал/шум >3, распределение ошибок фазы смеси сигнала с шумом близко к нормальному с СКО σΔφ = 1/√q, где q – отношение с/ш по мощности. С учетом этого СКО измерения по одной из шкал
 (5.24)
(5.24)
Таким образом, для уменьшения ошибок измерения при использовании фазового метода измерения радиальной скорости весьма важно иметь высокое отношение сигнал/шум.