

6.1.2 Влияние индикаторов на характеристики рлс
Индикаторы, являясь оконечными устройствами РЛС оказывают существенное влияние на ее параметры и, главным образом, на дальность обнаружения, точность определения координат, разрешающую и информационную способность.
Влияние индикатора на дальность обнаружения. Известно, что обнаружение целей возможно в том случае, если мощность принятого сигнала Рпр больше пороговой мощности Рпор, т.е. Рпр ≥ Р пор = mрРш, где mр – коэффициент различимости, который во многом определяется параметрами индикатора.
При этом из уравнения радиолокации дальность обнаружения
![]()
Поэтому влияние индикатора на Добн принято характеризовать величиной mр. Такой подход оправдан тем, что при визуальном обнаружении сигналов в импульсных РЛС используется последетекторное суммирование (накопление) сигналов (некогерентное накопление). Использование накопления позволяет значительно увеличить отношение Э/Nо энергии принимаемого сигнала к спектральной плотности шума, а значит, понизить пороговую мощность Рпор.
В простейшем случае такое накопление осуществляет ЭЛТ, однако лучше совместно с ней использовать специальные накопители. Сигналы на ЭЛТ интегрируются экраном трубки и глазом оператора, т.е. принимают участие физиологические особенности зрения и сознания оператора.
Интегрирующие свойства экрана являются следствием послесвечения экрана трубки и конечного (ненулевого) размера светящегося пятна на экране.
На формирование следа в сознании оператора влияет, в частности, яркость светящегося пятна на экране.
Интегрирующая способность экрана с длительным послесвечением, характеризуемая увеличением яркости под действием повторяющихся возбуждений показана на экспериментально полученной кривой рис.6.5 (в относительных единицах). Из рис.6.5 видно, что яркость свечения заметно возрастает примерно до 20 возбуждений.
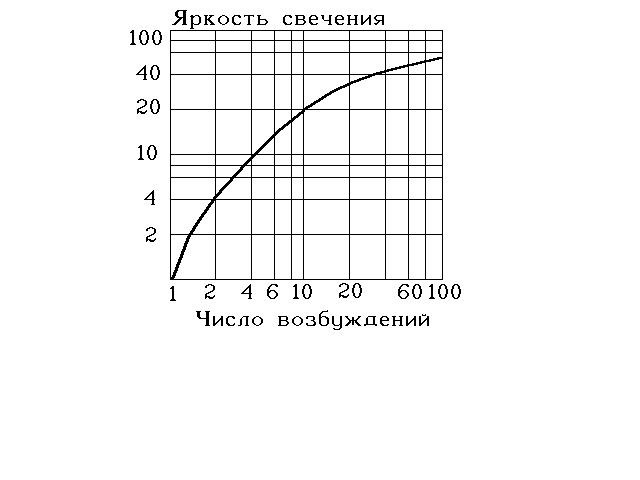
Рис.6.5. Влияние числа возбуждений на яркость свечения экрана
Накопительные
свойства экрана, а следовательно,
коэффициент различимости mр
и характер его изменения зависят от
способа построения индикатора и его
технических параметров. Поскольку
шумовые всплески интегрируются
непрерывно, а полезный сигнал имеет
ограниченное число импульсов, то
наблюдаемость сигналов сначала заметно
растет (mр
– уменьшается) приблизительно до 10-20
возбуждений. Дальнейший вклад каждого
импульса в увеличение яркости делается
все меньше и прирост яркости практически
прекращается. Это приводит к тому, что
при удвоении числа импульсов в пачке
происходит снижение порогового значения
mр
в![]() раз (1.5 дБ), а не в 2 раза (3 дБ), как это
должно быть при идеальном додетекторном
интегрировании. Рассмотренные эффекты
обусловлены потерями интегрирования
из-за накопления шумов. График измененияmр/mро,
где mро
– коэффициент различимости при идеальном
интегрировании, в зависимости от числа
N
интегрируемых импульсов приведен на
рис.6.6 (экспериментальные данные).
раз (1.5 дБ), а не в 2 раза (3 дБ), как это
должно быть при идеальном додетекторном
интегрировании. Рассмотренные эффекты
обусловлены потерями интегрирования
из-за накопления шумов. График измененияmр/mро,
где mро
– коэффициент различимости при идеальном
интегрировании, в зависимости от числа
N
интегрируемых импульсов приведен на
рис.6.6 (экспериментальные данные).

Рис.6.6. Зависимость отношения mр/mро от числа интегрируемых импульсов
Скорость развертки Vр непосредственно связана с масштабом индикатора и при заданном значении длительности импульса τ может быть выбран оптимальный масштаб индикатора с точки зрения наблюдаемости. Такой выбор осуществляется следующим образом.
Так как Vр = LрД/Tр, где LрД – длина развертки по дальности, Tр = 2Dшк/c – длительность развертки, Dшк – интервал дальностей, просматриваемых на развертке, учитывая (6.2), найдем
Vр = cLрД/(2Dшк) = cmД/2. (6.5)
Учитывая, что оптимальной для наблюдения является скорость развертки дальности Vро, при которой Vроτ/dп ≈ 1, получим оптимальный интервал дальностей, просматриваемый на развертке
Dшко = (сτLрД)/(2dп). (6.6)
Например, при τ = 1мкс, LрД = 150 мм, dп = 1мм, получим Dшко = 22,5 км.
Влияние индикатора на точность определения координат. Ошибка определения координат, привносимая индикаторным устройством, является одной из компонент инструментальных ошибок измерений, влияние которых было рассмотрено ранее.
В частности, при измерении дальности до цели, т.к. D = ctз/2, где tз – время запаздывания эхо-сигнала относительно импульса запуска, ошибка ее измерения складывается из ошибок, вызванных незнанием точного значения скорости распространения электромагнитных волн и погрешностью определения времени запаздывания отраженного сигнала.
Обычно принимают с = 3∙108 м/с, более точно с = 299792,5 км/с. Но и это значение среднее: изменяются условия распространения, искривляется траектория вследствие атмосферной рефракции. Все это методические ошибки, они могут быть учтены при калибровке дальномера РЛС.
Ошибки измерения времени запаздывания более значительны. Они связаны с несовершенством синхронизации (ошибки синхронизации выражаются в несоответствии запуска передатчика и развертки дальности в индикаторе), наличием задержки сигналов (предусмотренные и паразитные) в цепях и системах отсчета в РЛС. Предусмотренные ошибки легко учитываются, а паразитные вызывают систематические и случайные ошибки. Паразитные задержки происходят в цепях, содержащих индуктивности и емкости, они растягивают фронты импульсов, а это затрудняет точный отсчет дальности. Систематические ошибки устраняют калибровкой.
При визуальном съеме информации индикаторное устройство существенно влияет на величину ошибки, привносимой оператором. Как отмечалось в первой части курса лекций, эта ошибка состоит из двух компонент: ошибки интерполяции и ошибки определения центра отметки.
Ошибки интерполяции возникают при оценке на глаз положения отметки цели между делениями шкалы. Оцениваются такие ошибки:
σи = (0.1-0.15)ΔDшк,
где ΔDшк – расстояние между соседними метками дальности.
При съеме информации с использованием электронного маркера возникают ошибки совмещения маркера со срединой отметки от цели, причем эти ошибки тем меньше, чем больше масштаб дальности, отношение сигнал/шум и чувствительность (разрешающая способность) ЭЛТ, а также чем меньше диаметр пятна ЭЛТ.
Следует учитывать, что всякая нестабильность напряжений, питающих генератор развертки ЭЛТ, старение активных приборов (ламп, транзисторов) в той или иной мере отражаются на скорости и масштабе развертки, а значит влияют и на точность определения координат.
Влияние индикатора на разрешающую способность. Индикатор ухудшает разрешающую способность РЛС (в т.ч. по дальности ΔDмин) вследствие конечных размеров светового пятна.
При идеальной фокусировке разрешающая способность по дальности равна потенциальной, т.е. ограничивается только длительностью импульса τи (рис. 6.7,а) и равна ΔDмин = cτи/2.
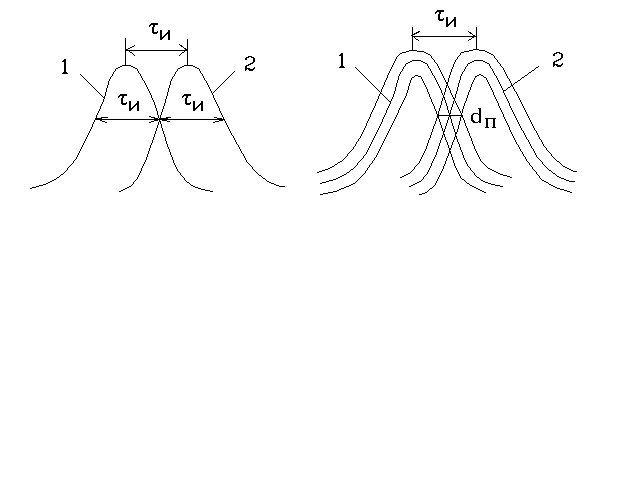
а) б)
Рис.6.7. К оценке разрешающей способности РЛС по дальности.
Контура реальных же отметок имеют толщину пятна dп (порядка 0.5-0.8 мм) (рис.6.7,б), что соответствует интервалу дальности dп/mД. Это снижает вероятность различения отметок целей и ухудшает разрешающую способность до величины
![]() (6.7)
(6.7)
Разрешающая способность трубки – число световых пятен диаметром dп, которые могут уложиться на диаметре трубки Qф = dтр/dп = Lшк/kтр dп, где kтр = Lшк/dтр – коэффициент использования экрана трубки, который показывает, какую часть диаметра трубки dтр составляет длина развертки Lшк, размещаемой на экране.
Электростатические ЭЛТ имеют разрешающую способность порядка Qф = 150-200, а магнитные более 300 (до 1000).
Таким образом, применяемые в настоящее время индикаторы на основе ЭЛТ оказывают существенное влияние на параметры РЛС и, главным образом, на дальность обнаружения, точность определения координат, разрешающую способность. Кроме того, индикаторные устройства могут влиять и на информационные способности РЛС.