

4.10.5 Устройство чпк на вычитающих потенциалоскопах
Роль канала задержки на период повторения Тп и схемы вычитания в аппаратуре защиты от пассивных помех, например, в РЛС П-14Ф, 5Н84А, П-19 и П-18 выполняет потенциалоскопическая трубка. Для более эффективного подавления помех в РЛС 5Н84А применяется двойное череспериодное вычитание (последовательное включение двух потенциалоскопов).
Вычитающий потенциалоскоп (ВП) представляет собой электронно-лучевую трубку с электростатической фокусировкой и электромагнитным управлением лучом (рис.4.58).
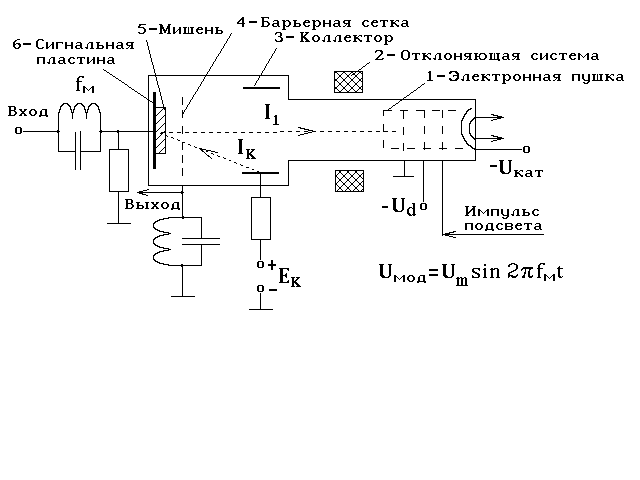
Рис.4.58. Устройство вычитающего потенциалоскопа
Входные сигналы подаются на сигнальную пластину и записываются на диэлектрической мишени в виде потенциального рельефа. Мишень выполнена из материала с высоким поверхностным сопротивлением, исключающим расстекание зарядов по мишени, и с коэффициентом вторичной эмиссии kэм, большим единицы. Коллектор находится под положительным потенциалом относительно мишени и создает для вторичных электронов, прошедших барьерную сетку, ускоряющее поле.
Рассмотрим процессы в потенциалоскопе при отсутсвии входных сигналов.
Первичный поток электронов, создаваемый электронной пушкой, попадая на участок мишени, выбивает из него вторичные электроны, число которых всегда больше первичных (kэм > 1). Поскольку поле в пространстве мишень-барьерная сетка в начальный момент отсутствует, почти все электроны попадут на коллектор, и вторичный ток будет больше первичного. Это приведет к тому, что участок мишени будет заряжаться положительно.
По мере увеличения потенциала мишени нарастает тормозящее поле для вторичных электронов и число тех из них, которые могут уйти к коллектору, уменьшается.
Процесс будет продолжаться до тех пор, пока на мишени не установится равновесный потенциал Uр, при котором количество электронов, приходящих на мишень, равно количеству электроном ушедших с мишени к коллектору.
При подаче на сигнальную пластину входного сигнала положительной полярности тормозящее поле в пространстве мишень-барьерная сетка возрастает и количество вторичных электронов, которые могут уйти к коллектору, уменьшается. Потенциал мишени начинает также уменьшаться, что приводит к уменьшению тормозящего поля и увеличению вторичного тока до тех пор, пока вновь не установится режим динамического равновесия. Потенциал мишени Uм будет при этом равен
Uм = Uр − k·Uвх ,
где Uвх − амплитуда входного сигнала; k < 1 − коэффициент, учитывающий действующую в пространстве мишень-барьерная сетка часть входного сигнала.
При подаче на сигнальную пластину отрицательных входных сигналов вторичный ток вначале возрастает, а затем начинает убывать до значения первичного тока. Потенциал мишени будет при этом повышаться до значения
Uм = Uр + k·Uвх.
Для записи всех отраженных сигналов в данном периоде повторения производится развертывание электронного луча по мишени. Обычно для этого используется спиральная развертка, создаваемая с помощью отклоняющей системы, запитываемой от специального генератора (как правило, на контурах с ударным возбуждением). Генератор синхронизирован импульсом запуска РЛС и вырабатывает два линейно-нарастающих (или спадающих) по амплитуде колебания, сдвинутых по фазе на 90о. Частота этих колебаний выбирается из условия получения заданной разрешающей способности потенциалоскопа по дальности:
fсп ≥ c∙dл/2∙lсп∙(δRп − δR),
где dл − диаметр электронного луча в плоскости мишени; c − скорость света; lсп − средняя длина одного витка; δRп − разрешающая способность по дальности с учетом потенциалоскопа; δR = c.τи(в)/2, где τи(в) − длительность импульса, отраженного от цели на входе потенциалоскопа.
Изменение тока в нагрузке пропорционально изменению потенциала мишени ΔUм. Поэтому выходное напряжение пропорционально разности входных сигналов в смежных периодах повторения, т.е.
Uвых(t) = Uвх(t) − Uвх(t − Tп).
Следует отметить, что при изменении потенциала мишени изменяется не только ток коллектора, но и появляются токи заряда (перезаряда) емкостей участков сигнальная пластина-мишень и мишень-барьерная сетка. Поэтому нагрузку можно включать как в цепь коллектора, так и в цепь сигнальной пластины и барьерной сетки.
При выборе места включения нагрузки руководствуются требованием максимального снижения коэффициента изменения потерь kL, который зависит от уровня собственных шумов потенциалоскопа. Источниками шумов потенциалоскопа являются: неравномерность диэлектрических свойств мишени; неравномерная прозрачность барьерной сетки; тепловые шумы коллектора, обусловленные его разогревом из-за наличия постоянной составляющей тока коллектора; влияние поля отклоняющей системы; уход части вторичных электронов в горловину трубки.
Наибольший уровень собственных шумов потенциалоскоп имеет в цепи коллектора, так как на него влияют перечисленные факторы, а наименьший − в цепях сигнальной пластины и барьерной сетки. Поэтому для снижения kL нагрузку необходимо включать либо в цепь сигнальной пластины, либо в цепь барьерной сетки. Это в свою очередь, требует разделения входных и выходных сигналов, поскольку они действуют в одних и тех же цепях. Без такого разделения невозможно получить эффект череспериодного вычитания, т.к. малый выходной сигнал (результат вычитания), составляющий единицы милливольт, будет подавлен большим входным сигналом, имеющим значение десятков вольт.
Наиболее приемлемым способом разделения входных и выходных сигналов является частотный способ. Сущность его состоит в том, что выходной сигнал преобразуется в радиоимпульс с несущей частотой fм значение которой выбирается из условия разнесения спектров входного и выходного сигналов, обеспечивающего их надежное разделение. Обычно fм = (20-50)/τи. Преобразование осуществляется путем модуляции первичного луча потенциалоскопа колебаниями Uмод(t), причем режим потенциалоскопа выбирается таким, чтобы он открывался только положительными полупериодами колебаний модулирующей частоты fм. При этом как первичный, так и вторичный токи будут иметь пульсирующий характер (рис.4.59).
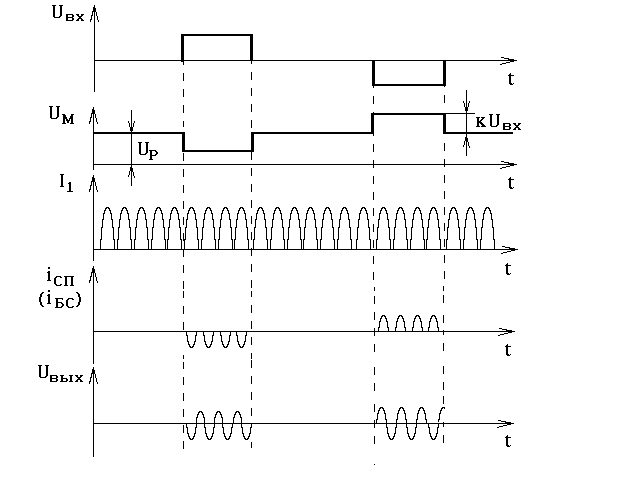
Рис.4.59. Иллюстрация принципа частотного разделения каналов
Если в качестве нагрузки использовать колебательный контур, настроенный на частоту fм, он выделит первую гармонику последовательности пульсирующих импульсов и выходной сигнал будет иметь вид радиоимпульса. Чтобы исключить ударное возбуждение этого контура входным сигналом, в цепи подачи последнего ставится фильтр-пробка, представляющий собой параллельный контур, настроенный на частоту fм.
Амплитуда выходного радиоимпульса зависит от модуля разности амплитуд входных сигналов в смежных периодах повторения, а фаза 0 или π − от знака этой разности.
Чтобы исключить подавление сигналов от целей, летящих с оптимальными скоростями, при многократном вычитании необходимо осуществить синхронное детектирование выходных сигналов потенциалоскопа.
Действительно, сигналы от таких целей на выходе потенциалоскопа будут представлять собой радиоимпульсы с одинаковой амплитудой и чередующейся от периоду к периоду начальной фазой 0 или π. При амплитудном детектировании на вход второго устройства ЧПК они будут подаваться в виде последовательности видеоимпульсов одинаковой амплитуды и полярности, а следовательно, будут скомпенсированы.
Таким образом, в состав устройства ЧПК кроме вычитающего потенциалоскопа должны входить (рис.4.60):
устройство разделения входных и выходных сигналов, включающее фильтр-пробку и нагрузочный контур;
модулирующий гетеродин;
синхронный детектор;
усилители входных и выходных сигналов;
генератор спиральной развертки.

Рис.4.60. Структурная схема ЧПК на вычитающем потенциалоскопе
Фазосдвигающая цепь обеспечивает синфазность (или противофазность для сигналов с фазой π) сигналов и опорного напряжения на входе синхронного детектора.