

6.2.2 Ико с вращающимися отклоняющими системами
Для создания радиально-круговой развертки (РКР) с помощью вращающихся отклоняющих катушек (ОК), формирующих магнитное поле, которое отклоняет электронный пучок перпендикулярно линиям магнитного поля, требуется их питание током пилообразной формы постоянной амплитуды Im.
На рис.6.12 приведена функциональная схема типового ИКО, использующего вращающиеся ОК для создания РКР.
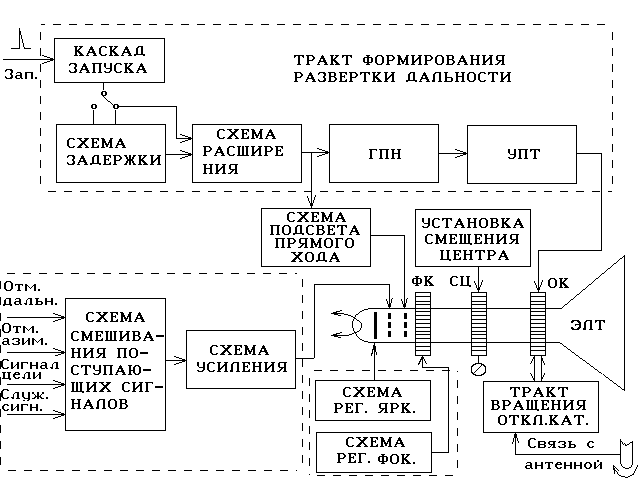
Рис.6.12. Функциональная схема ИКО с вращающимися отклоняющими системами
Рассмотрим работу канала развертки. На рис.6.13 показана упрощенная схема, а на рис.6.14 – эпюры, поясняющие работу схемы.
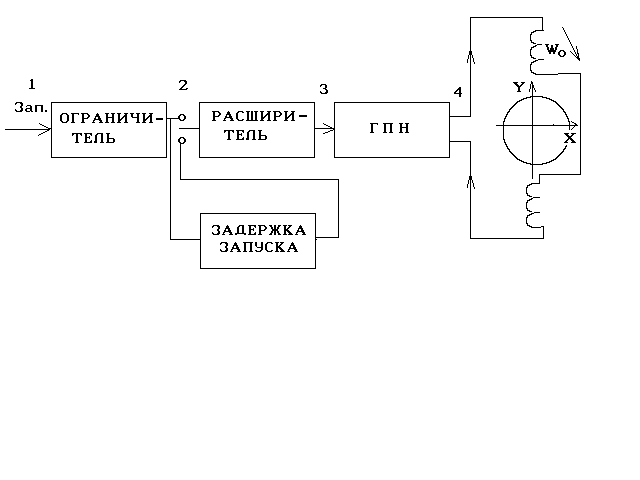
Рис.6.13. Упрощенная структурная схема канала развертки дальности
Ограничитель предназначен для исключения запуска развертки от случайных импульсных наводок и осуществления запуска стабильными по амплитуде импульсами.
Расширитель представляет собой ждущий мультивибратор и предназначен для обеспечения нормальной работы генератора линейно изменяющегося тока (ЛИТ). Пилообразный ток, создаваемый ЛИТ, протекая от отклоняющим катушкам, формирует изменяющееся магнитное поле, перемещающее электронный пучок вдоль радиуса экрана ЭЛТ, т.е. образует линейную развертку по дальности. Отклоняющие катушки вращаются в плоскости, перпендикулярной оси трубки, со скоростью, равной скорости вращения антенны. Таким образом, необходимый закон поворота магнитного поля обеспечивается поворотом самих катушек.
В магнитных трубках, используемых в ИКО, отклонение электронного пучка прямопропорционально току iк отклоняющих катушек (ОК), а не напряжению Uк, как в электростатических трубках, т.е. именно ток iк должен меняться по линейному закону.
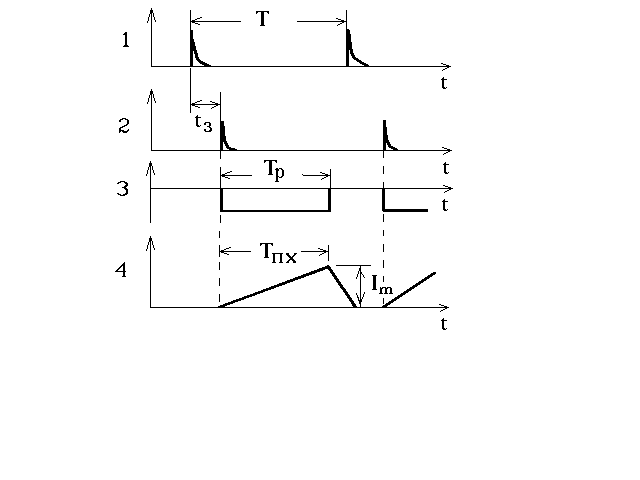
Рис.6.14. Эпюры, поясняющие работу канала развертки дальности
Такой ток генерировать труднее, чем линейно-изменяющееся напряжение, т.к. полное сопротивление ОК имеет малую величину и комплексный характер. Оно образуется индуктивностью Lк, паразитной емкостью Ск, сопротивлением потерь rк катушки и сопротивлением шунта Rш (рис.6.15,а), где
ur = iк·rк ;
![]()
uк = uL + ur .
Эпюры напряжений, поясняющие работу схемы, показаны на рис.6.15,б.

а) б)
Рис.6.15. Эквивалентная схема ОК (а) и эпюры, поясняющие ее работу (б)
Поскольку ток должен изменяться по линейному закону, что сложно технически, то предпочтение отдают созданию линейно изменяющегося напряжения. В этом случае напряжение на ОК (эквивалентная схема ОК содержит параллельное соединение активного сопротивления шунта Rш, реактивных сопротивлений индуктивности и емкости катушки) равно сумме напряжений на активном сопротивлении катушки и индуктивности. Это приводит к тому, что напряжение на ОК будет трапециадальным по форме, следовательно, здесь корректнее использовать название генератор импульсов трапециадальной формы.
Для передачи вращения от антенны к ОК могут быть применены механическая передача или синхронно-следящая система. Механическая передача вращения может быть осуществлена с помощью гибкого вала либо зубчатой передачи. Однако в этом случае получаются большие ошибки (+1о) и невозможно передать вращение антенны на большие расстояния. Если расстояние между приводом антенны и индикатором не превышает 1-1.5 метра, то используют связь механическую с помощью гибкого вала. Синхронно-следящая система обеспечивает высокую точность передачи и широко применяется в индикаторах РЛС.
Устройство смещения центра обеспечивает вынос начала развертки в любую точку экрана и за его пределы. Для этого катушка смещения развертки током, величина которого может меняться в требуемых пределах и поворачиваться относительно горловины трубки на любой угол.