

4.10.4 Устройство череспериодной компенсации
В аналоговых системах СДЦ устройства череспериодного вычитания (ЧПВ) или череспериодной компенсации (ЧПК) могут быть реализованы на вычитающих потенциалоскопах и на ультразвуковых линиях задержки (УЛЗ). Эквивалентные структурные схемы таких ЧПВ с однократным и двухкратным вычитанием представлены на рис.4.53.

Рис.4.53. Эквивалентные схемы устройств ЧПК: а − с однократным вычитанием; б − с двухкратным вычитанием
АЧХ этих устройств определяются соответственно соотношениями:
K(f)I = |sin(π·f·Tп)|,
K(f)II = sin2(π·f·Tп) .
Рассмотрим особенности технической реализации устройств ЧПК на ультразвуковых линиях задержки (УЛЗ).
Скорость распространения звука значительно меньше скорости света (табл.4.5), что позволяет реализовать достаточно большое время задержки при приемлемых размерах линии.
Структурная схема устройства ЧПК на УЛЗ показана на рис.4.54. В УЛЗ (рис.4.55) электромагнитная энергия преобразуется в энергию ультразвуковых колебаний с помощью входного пьезоэлектрического преобразователя (кристаллы кварца, титаната бария и т.д.). Выходной преобразователь осуществляет обратное преобразование.
Таблица 4.5
|
Среда |
Скорость распространения ультразвука, м/с |
Затухание дБ/см |
Температурный коэфф. изменения скорости при 20оС |
|
Вода |
1500 |
0,047 |
2·103 |
|
Ртуть |
1450 |
0,083 |
2·104 |
|
Плавленный кварц |
5450 |
0,0068 |
10-4 |
|
Магниевые сплавы |
5600-5800 |
0,10,2 |
3·10-4 |
В качестве звукопровода могут применяться: ртуть, вода, плавленный кварц, монокристаллы солей NaCl, KCl, BaF2 и др. Для уменьшения габаритов в ней используют многократные отражения.

Рис.4.54. Структурная схема устройства ЧПК на УЛЗ

Рис.4.55. Основные элементы УЛЗ
К УЛЗ предъявляются следующие основные требования: минимально возможные искажения и ослабление задерживаемых сигналов; минимальный уровень паразитных отражений; высокая стабильность времени задержки.
Для обеспечения первого требования пьезоэлектрический преобразователь должен возбуждаться радиоимпульсами на частоте, близкой или равной его резонансной частоте. С этой целью видеоимпульсы с выхода ФД преобразуются в радиоимпульсы с помощью модулирующего гетеродина и модулятора (рис.4.54). Принцип переноса спектра видеосигналов в область радиочастот иллюстрируется эпюрами, показанными на рис.4.56.
Ослабление сигналов при прохождении УЛЗ вызывается затуханием энергии сигналов в преобразователях, среде и отражателях. Суммарный коэффициент ослабления сигналов при прохождении через УЛЗ может достигать 60-70 дБ. Поэтому после УЛЗ необходимо усиливать сигналы до уровня, достаточного для линейного детектирования или нормальной работы последующих устройств.
В любой реальной ЛЗ имеют место многократные паразитные отражения энергии, возникающие на границе сред с различными акустическими сопротивлениями. Источниками этих отражений могут быть приемный и передающий преобразователи, торцы звукопровода, держатели преобразователей и другие конструктивные элементы линии.
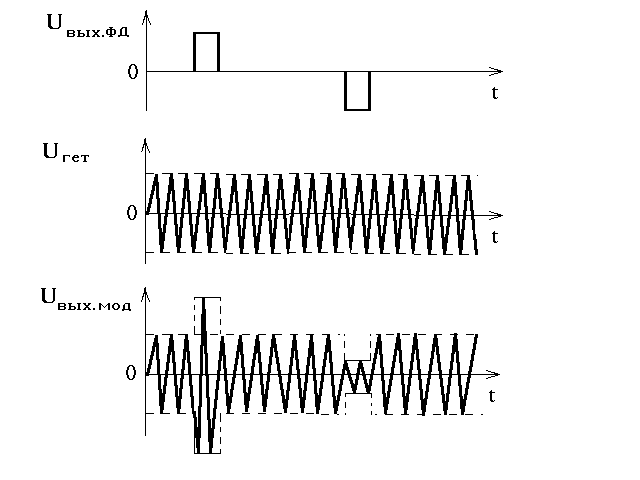
Рис.4.56. Принцип переноса спектра видеосигналов в область радиочастот
Для уменьшения влияния паразитных отражений применяются следующие способы.
1. Обеспечение такого затухания энергии в линии, при котором отражения, вторично попадая на выходной преобразователь, не превышали бы уровень шумов. Необходимое ослабление отражений обычно достигается подбором вида звукопроводящей среды и несущей частоты передаваемых сигналов (5-35 МГц).
2. Поглощение энергии отражений в пространстве за преобразователем достигается с помощью применения поглощающих насадок, представляющие собой геометрические тела особой конфигурации, исключающие попадание паразитных отражений в звукопровод.
Важным при реализации устройств ЧПК является обеспечение равенства периода повторения импульсов Тп суммарному времени задержки в УЛЗ Тлз и компенсирующем усилителе Тку. Одна из таких возможных причин неравенства – зависимость времени Тлз от температуры.
Чтобы обеспечить равенство Тп = Тлз + Тку целесообразно использовать для регулирования периода повторения импульсов ту же УЛЗ, которая применяется для ЧПК.
С целью обеспечения индентичности АЧХ задерживающего и прямого каналов в состав последнего входят аттенюатор, имитирующий затухание в УЛЗ, и компенсирующий усилитель, подобный используемому после УЛЗ.
Для компенсации действия дополнительной задержки при запуске Тзап в компенсирующем усилителе прямого канала после детектора включается специальная (обычно регулируемая электрически) ЛЗ с временем задержки Тзад равным Тзад = Тзап + Тку.
Равенство коэффициентов усиления задерживающего и прямого каналов поддерживается с помощью дифференциальной АРУ (ДАРУ) с постоянной времени, значительно превышающей Тп (рис.4.54).
В качестве схемы вычитания в устройствах ЧПК на УЛЗ может применяться дифференциальный детектор (рис.4.57). Если обе половины дифференциального детектора имеют одинаковые параметры и характеристики, то сигнал на выходе детектора
UвыхД = kД (UвхЗ − UвхПР),
где kД − коэффициент передачи детекторов, UвхЗ, UвхПР – амплитуды соотвестсвенно задерживающего и прямого сигналов на входе дифференциального детектора.
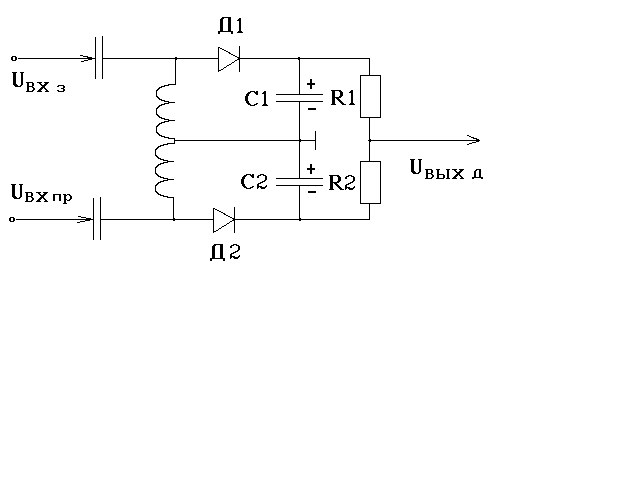
Рис.4.57. Дифференциальный детектор
Таким образом, нескомпенсированные сигналы могут быть как положительной, так и отрицательной полярности. Дальнейшее их усиление и преобразование определяется кратностью вычитания и особенностями устройства накопления сигналов (индикатора).