

4.8.2 Основные характеристики системы сдц
К основным характеристикам любой системы СДЦ относятся:
1. Скоростная характеристика, представляющая собой зависимость коэффициента передачи полезного сигнала по мощности Рс вых/Рс вх от радиальной скорости (частоты Доплера) Кс Р = f(Vr) или Kс Р = f(Fд), т.е.
![]() (4.25)
(4.25)
где Рс вх, Рс вых – мощность полезного сигнала на входе и выходе системы соответственно.
Качество прохождения полезного сигнала через систему СДЦ определяется коэффициентом передачи полезного сигнала.
Скоростная характеристика системы СДЦ зависит от кратности вычитания сигналов, которая определяется числом последовательно включенных устройств ЧПК. Соотношения, определяющие зависимости Кс Р = f(Vr) или Kс Р = f(Fд) при различной кратности вычитания, представлены в табл.4.3.
Таблица 4.3
|
Кратность вычитания |
Основные соотношения | |
|
Кс Р(Fд) |
Kс Р(Vr) | |
|
Однократное |
4sin2 (π·FдTп) |
4sin2 (π·Vr/Vrсл1) |
|
Двухкратное |
16sin4 (π·FдTп) |
16sin4 (π·Vr/Vrсл1) |
|
Трехкратное |
64sin6 (π·FдTп) |
64sin6 (π·Vr/Vrсл1) |
На рис.4.43 графически изображены зависимости нормированного коэффициента передачи сигнала от доплеровской поправки частоты Fд.
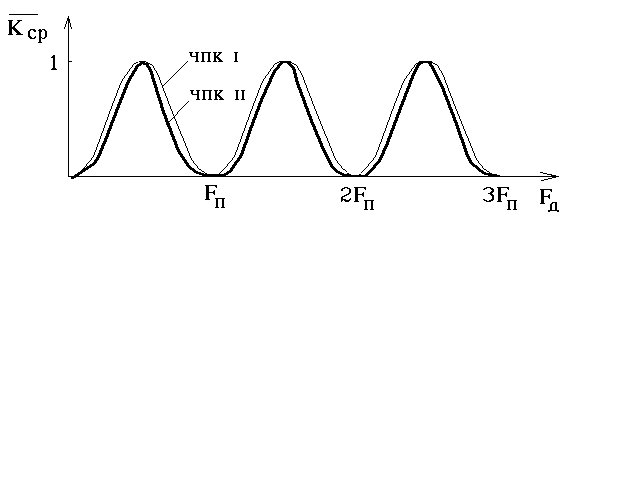
Рис.4.43. Скоростные характеристики устройств ЧПК
2. Качество подавления пассивных помех определяется коэффициентом ее подавления
![]() (4.26)
(4.26)
где Рпп вх, Рпп вых – мощность пассивных помех на входе и выходе системы СДЦ соответственно.
Определяя мощности помехи на входе Pпп вх =σ2п вх = M[u2вх] и выходе Pпп вых = σ 2п вых = M[uвх(t) – uвх(t – Tп)]2, например, для устройства однократного ЧПК, после преобразований получим выражение для коэффициента подавления помехи
Кпп = 1/ 2[1 – ρ(Tп)],
Здесь ρ(Tп) = 1/σ2п вх · M{uвх(t) · uвх(t – Tп)} – междупериодный коэффициент корреляции флюктуаций пассивной помехи.
Коэффициент подавления легко измерить, однако он недостаточно полно описывает устройство режекции пассивной помехи, т.к. не учитывает прохождение полезного сигнала и влияние собственных шумов приемника.
3. В качестве общего показателя эффективности системы СДЦ можно использовать коэффициент улучшения отношения сигнал-помеха
![]() (4.27)
(4.27)
который показывает, во сколько раз отношение сигнал/помеха на выходе СДЦ больше отношения сигнал/помеха на ее входе. Учитывая, что
Рс вых/ Рс вх = Кс Р , а Рпп вх/ Рпп вых = Кпп,
получим
Ку = Кс Р·Кпп (4.28)
Коэффициент улучшения учитывает и ослабление пассивных помех в фильтре СДЦ и средний выигрыш фильтра СДЦ, т.е. это показатель отклика фильтра СДЦ на сигналы пассивных помех по отношению к отклику на сигналы целей.
В формуле (4.28) предполагается, что сигнал от цели имеет постоянную амплитуду, радиальная скорость цели равновероятна для всего диапазона значений. Предполагается также, что помеха является узкополосной с центральной частотой, которая совпадает с центром полосы режекции фильтра СДЦ, а приемник обладает сколь угодно большим динамическим диапазоном.
Соотношение (4.28) можно представить иначе, если учесть, что для собственных шумов приемника также сохраняется свойство равновероятности распределения по частотному диапазону, и, следовательно, справедливо соотношение
Рс вых/ Рс вх = Рш вых/ Рш вх . (4.29)
Соотношение Рш вых/ Рш вх есть коэффициент усиления собственных шумов приемника режекторным фильтром Кш, т.е. коэффициент шума режекторного фильтра, тогда
Ку = Кш·Кпп . (4.30)
Как следует из определения коэффициента улучшения, для его вычисления необходимо знать мощность остатков пассивных помех Pпп вых. На эту величину оказывают влияние нестабильность элементов системы СДЦ.
Основными нестабильностями, влияющими на эффективность СДЦ при внутренней когерентности, являются: нестабильность частоты импульсного генератора передатчика или изменение фазы от импульса к импульсу в усилителе мощности; нестабильность частоты местного и когерентного гетеродинов; неидеальность фазовой синхронизации когерентного гетеродина; нестабильность длительности импульса; нестабильность амплитуды зондирующих импульсов; нестабильность периода повторения импульсов; рассогласование задерживающего и прямого каналов в устройстве ЧПК и другие.
4. Коэффициент подпомеховой видимости Кпв есть отношение, показывающее насколько средняя мощность сигнала от цели РСвх на входе приемника может быть слабее интенсивности пассивной помехи РПвх на входе приемника, при котором обеспечивается обнаружение сигнала с заданными вероятностями правильного обнаружения D = Dзад и ложной тревоги F = Fзад. Вероятности правильного обнаружения и ложной тревоги обычно выбирают равными D = 0,5 и D = 0,8, F = 10-6. Считается, что плотность распределения радиальных скоростей обнаруживаемых целей равновероятна.
Кпв = Рпвх/Рсвх │D = Dзад , (4.31)
│F = Fзад
Исходя из этого определения следует, что Kпв характеризует способность РЛС обнаруживать сигнал на фоне интенсивных пассивных помех. Этот параметр зависит не только от характеристик режекторных фильтров, но и от используемого алгоритма обнаружения.
5. kL – коэффициент изменения потерь при включении системы СДЦ. Числовое значение kL зависит от технической реализации устройств ЧПК и составляет в среднем 3-5 дБ. Последняя цифра относится к системам СДЦ, у которых устройство ЧПК выполнено на потенциалоскопах. Если в системе СДЦ на видеочастоте используется только один канал (без разделения на квадратурные каналы), то коэффициент потерь kL дополнительно увеличивается на 2 дБ.
Следует иметь ввиду, что даже при kL = 3 дБ включение системы СДЦ на базе устройств череспериодной компенсации с двухкратным вычитанием при отсутствии пассивных помех приводит к снижению дальности действия РЛС примерно на 20%. Это обстоятельство подчеркивает настоятельную необходимость применения в РЛС устройств, обеспечивающих автоматическое переключение режимов работы ее работы.
Рассмотрим подробнее перечисленные характеристики для различной кратности вычитания и установим связь между ними.
Аналитические выражения для определения коэффициента улучшения отношения сигнал-помеха и коэффициента подавления при различной кратности вычитания и равновероятном законе распределения вероятностей радиальных скоростей цели приведены в табл.4.4. Так, например, при колокольной аппроксимации энергетического спектра флюктуаций пассивных помех выражение для коэффициента межпериодной корреляции сигналов пассивных помех на входах схемы вычитания устройства ЧПК имеет вид
![]() (4.32)
(4.32)
где σF – полуширина спектра флюктуаций пассивной помехи с учетом всех декоррелирующих факторов. Величина σF зависит от хаотического перемещения мешающих отражателей, вращения антенны, нестабильностей частот передающего устройства, когерентного и местного гетеродинов.
Таблица 4.4
|
Кратность вычитания |
Основные соотношения для Кпп и КУ |
|
Однократное |
Кпп = 0,5/[1 – ρ(Tп)]
|
|
Двухкратное |
Кпп= 0,5/[3 – 4ρ(Tп) + ρ(2Tп)]
|
|
Трехкратное |
Кпп= 0,5/[10 – 15ρ(Tп) + 6ρ(2Tп) – ρ(3Tп)]
|

Если предположить, что все эти факторы независимы (что вполне реально), то можно записать, что
σ2F = σ2Fхп + σ2Fва + σ2Fпу + σ2Fкг + σ2Fмг,
где σ2Fхп, σ2Fва, σ2Fпу, σ2Fкг, σ2Fмг – половина ширины спектра флюктуаций пассивной помехи, обусловленными соответственно хаотическим перемещением мешающих отражений, вращением антенны, нестабильностями частот передающего, когерентного и местного гетеродинов; ΔFдПП = | foПП – fo| – разность частот сигналов, отраженных от источников пассивных помех и опорного напряжения.
При скомпенсированной скорости ветра (ΔFдПП = 0) выражение (4.32) для коэффициента междупериодной корреляции упрощается:
![]() (4.33)
(4.33)
При малых значениях показателя степени последнее выражение можно записать так:
![]() (4.34)
(4.34)
Подставив упрощенные выражения соответствующих коэффициентов корреляции сигналов пассивных помех в общие соотношения для Кпп (см. табл.4.4), с учетом выражения (4.34), получим упрощенные формулы для расчета коэффициента подавления сигналов ПП при скомпенсированной скорости ветра и колокольной аппроксимации энергетического спектра флюктуаций сигналов ПП:
 (4.35)
(4.35)
 (4.36)
(4.36)
 (4.37)
(4.37)
Для получения формулы (4.35) достаточно ограничиться двумя членами в разложении (4.34), а для получения выражения (4.37) необходимо использовать четыре слагаемых.
С учетом формулы (4.28) соотношения, определяющие значения коэффициента улучшения при различной кратности вычитания, будут иметь вид
 (4.38)
(4.38)
 (4.39)
(4.39)
 (4.40)
(4.40)
Из соотношений (4.38-4.40) следует, что при всех прочих равных условиях увеличение кратности вычитания приводит к увеличению Ку. Однако в общем случае, когда форма огибающей корреляционной функции флюктуаций ПП близка к экспоненциальной (энергетический спектр флюктуаций в этом случае аппроксимируется следующим выражением Nфл(F) = Nфл (0)/ [1 + (F/1,25 σF)2]), увеличение кратности вычитания не приводит к увеличению Ку.
Коэффициенты Кпв и Ку являются наиболее распространенными показателями эффективности устройств СДЦ.
При этом, если Ку характеризует эффективность только устройства режекции, то Кпв характеризует способность РЛС обнаруживать сигнал на фоне интенсивных пассивных помех и, следовательно, этот параметр зависит не только от характеристик режекторного фильтра, но и от используемого алгоритма обнаружения. Другими словами, Кпв характеризует эффективность тракта от режекторного фильтра до порогового устройства, который включает также детектор и накопитель.
Определим связь между Ку и Кпв.
В соответствии с определением коэффициента подпомеховой видимости Кпв можно записать

или в децибелах
Кпв= Ку − qпор . (4.42)
Отношение (РС/РП)вых есть пороговое отношение qпор и представляет собой минимальное превышение сигнала над помехой, необходимое для обнаружения цели. Оно зависит от модели сигнала и помех, критерия обнаружения, заданных вероятностей правильного обнаружения и ложной тревоги, времени обнаружения (числа импульсов в пачке).
Рассмотрим пример обоснования требований к системе СДЦ РЛС типа П-37.
Исходя из назначения систем СДЦ, они должны: во-первых, подавлять (компенсировать) пассивные помехи; во-вторых, выделять (пропускать) полезные сигналы.
Поэтому эффективность работы системы должна оцениваться качеством прохождения через нее полезного сигнала и качеством подавления в ней пассивных помех.
Качество прохождения полезного сигнала через систему СДЦ определяется коэффициентом передачи полезного сигнала.
При двухкратном ЧПВ, реализованном в РЛС П-37, как известно, АЧХ устройства выражается следующей зависимостью
|К2(f)| = 4·sin2 π·Fд·Tп .
Видно, что коэффициент передачи полезного сигнала зависит от доплеровского смещения частоты Fд сигнала. В силу этого, качество прохождения полезного сигнала через систему СДЦ можно оценивать средним значением коэффициента передачи К2. Можно показать, что он равен
К2 = 0,4·К2макс ,
где К2макс ≈ 4 − максимальное значение коэффициента передачи устройства 2-х кратного ЧПВ. Следовательно,
К2 = 0,4·4 = 1,6 , К2 (дБ) = 10·lg К2 ≈ 2.
Качество подавления пассивных помех определяется коэффициентом ее подавления.
В общем случае величина коэффициента подавления зависит от нормированной функции корреляции пассивных помех ρ(τ), величины межпериодного коэффициента корреляции ρ(Tп), а также от кратности вычитания в устройстве ЧПВ и выражается следующей зависимостью (см.табл.4.4)
![]() (4.43)
(4.43)
Если описать нормированную функцию корреляции ПП гауссовой кривой
ρ(τ) = exp { − 2π2 σ2F τ2 }, (4.44)
где 2σF −ширина спектра флюктуаций пассивной помехи с учетом всех декоррелирующих факторов, то выражение (4.44) можно представить в следующем виде
![]() (4.45)
(4.45)
Если разложить (4.44) в ряд и ограничиться первыми двумя членами разложения, то после подстановки выражения (4.44) в (4.45), получим
 (4.46)
(4.46)
С учетом изложенного можно показать, что для параметров РЛС П-37, у которой σF ≤ 35 Гц при Fп = 700 Гц, из формулы (4.46) найдем, что Кпп2 ≥ 34 или Кпп2 (дБ) = 10lg Кпп2 ≥ 15.
Коэффициент улучшения определяется по формуле Ку2 = К2·Кпп2.
С учетом ранее изложенного, имеем
Ку2 = 34·1,6 = 55 или Ку2 (дБ) = 10lg Ку2 = 17.
Таким образом, для рассмотренного примера основные технические параметры системы СДЦ должны иметь следующие значения:
коэффициент подавления пассивных помех Кпп ≥ 15 дБ;
среднее значение коэффициента передачи полезного сигнала К2 >2 дБ;
средний коэффициент улучшения Ку2 ≥ 17 дБ.