

5.5.6.2 Структурная схема алгоритма сопровождения траекторий
В процессе автосопровождения каждой цели решаются две основные задачи:
стробирование и отбор новых отметок для продолжения траектории;
сглаживание параметров траектории цели и построение функции, описывающей изменение этих параметров во времени.
Первая задача решается исключительно в интересах слежения за траекторией. Вторая задача решается, кроме того, в интересах потребителей РЛИ, т.к. полученные в процессе сглаживания параметры траектории используются для оценки обстановки и принятия решения на применение активных средств ПВО.
На алгоритм автосопровождения возлагается только задача слежения за траекторией, а для эффективного сглаживания параметров траектории в интересах потребителей информации строится отдельный вычислительный алгоритм, называемый алгоритмом траекторного сглаживания (АТС).
Целесообразность выделения специального алгоритма траекторного сглаживания следует из следующих соображений.
1) Задачи сглаживания и экстраполяции параметров траектории для обеспечения непрерывности сопровождения цели должны решаться в системе координат, измеряемых РЛС (D, β, ε) с частотой 1/tобз. К точности полученных при этом оценок не предъявляется жестких требований, что позволяет проводить вычисления по упрощенным формулам, исходя из гипотезы прямолинейного равномерного движения цели.
2) Сглаживание параметров траектории в интересах потребителей РЛИ должно производиться с учетом всех доступных сведений о характере движения цели (удаляющаяся или приближающаяся, аэродинамическая или аэробаллистическая, маневрирующая или неманеврирующая и т.д.) по точным формулам алгоритма последовательного сглаживания. Сглаженные параметры при этом могут быть представлены в другой, отличной от радиолокационной, системе координат (например, в прямоугольной системе координат с центром в точке расположения КП).
3) Потребителей интересует в первую очередь информация о целях, представляющих опасность для обороняемых объектов. Именно по таким целям и необходимо рассчитывать точные значения параметров траектории. Не все обнаруживаемые РЛС цели одинаково опасны, а некоторые вообще не представляют интереса для системы обороны (удаляющиеся цели, заявочные цели и т.д.). Следовательно, сглаживание параметров траекторий с высокой точностью необходимо только для части сопровождаемых целей. Выделение отдельного АТС позволяет уменьшить требования к быстродействию и объему памяти вычислительных средств.
Структурная схема алгоритма автосопровождения цели приведена на рис.5.30.
В блоке 1 решается задача отбора и селекции отметок для продолжения траектории. Алгоритм стробирования и селекции отметок в стробе строится в соответствии с теоретическими предпосылками, рассмотренными ранее. Отселектированной отметке присваивается номер сопровождаемой траектории (цели) и она передается на вход АТС (блок 6). Одновременно новая отметка используется для сглаживания и экстраполяции координат на следующий обзор (блоки 2 и 3), т.е. подготовки следующего цикла стробирования и селекции. При этом сглаживание производится при упрощенных предпосылках о законе движения цели и ошибках измерения координат. Например, координаты вообще не сглаживаются, скорости сглаживаются по простейшим формулам. Экстраполяция производится по линейному закону.
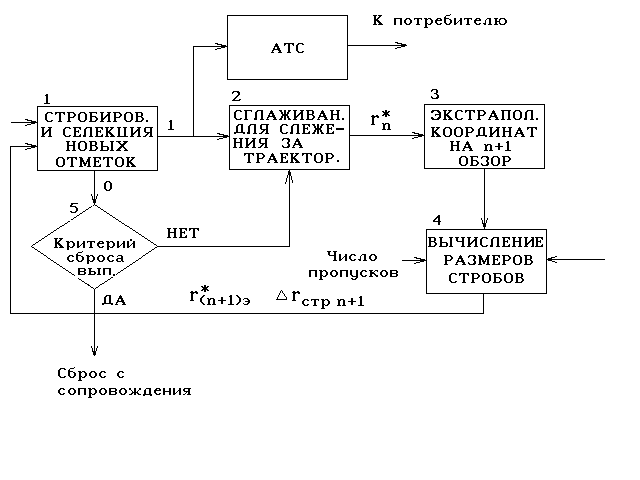
Рис.5.30. Структурная схема алгоритма автосопровождения цели
В блоке 4 вычисляются размеры строба. При этом используется информация о точностных характеристиках измеренных (σn изм) и экстраполированных (σ(n+1) э) координат

а также информация о пропуске отметок в стробе.
При отсутствии новой отметки для продолжения траектории проверяется критерий сброса этой траектории с сопровождения (блок 5). При выполнении критерия сброса сопровождение цели прекращается, а предыдущая информация о ней «стирается». Если же критерий сброса не выполняется, то в качестве координат новой отметки используются координаты экстраполированной точки и производится новый цикл вычислений.
Таким образом, в процессе автосопровождения каждой цели решаются две основные задачи: стробирование и отбор новых отметок для продолжения траектории; сглаживание параметров траектории цели и построение функции, описывающей изменение этих параметров во времени. При этом вторая задача решается путем введения отдельного алгоритма траекторного сглаживания.