

5.5 Вторичная обработка радиолокационной информации
Для решения тактических задач наведения огневых средств необходима непрерывная информация о координатах и параметрах движения целей как на интервале времени их наблюдения, так и вне его. Однако сведения о координатах целей, как правило, поступают на РЛС дискретно во времени с периодом обзора пространства. Возникает задача воспроизведения (аппроксимации) непрерывной траектории цели и оценки параметров ее движения по дискретным отсчетам. Такая задача решается в ходе вторичной обработки информации-обнаружения и сопровождения траекторий (трасс) воздушных объектов, определения параметров их движения.
5.5.1 Существо процедур вторичной обработки рли
Процесс вторичной обработки складывается в результате последовательного выполнения следующих операций:
обнаружение трасс целей;
сопровождение и оценка параметров траектории.
Обнаружение трассы в процессе вторичной обработки может осуществляться визуально (оператором) или автоматически (вычислительным устройством).
Автоматическое обнаружение трассы называют автозахватом. Для уяснения физической сущности операций вторичной обработки рассмотрим один из возможных способов автозахвата трассы цели по данным двухкоординатной обзорной РЛС (рис.5.24).
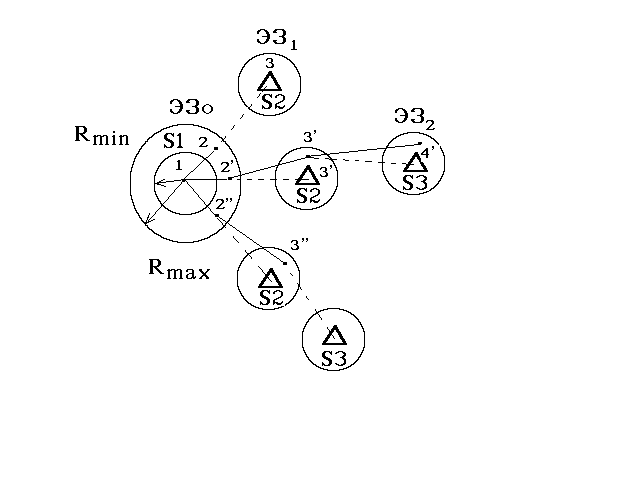
Рис.5.24. Вариант способа автозахвата трассы цели по данным двухкоординатной обзорной РЛС
Пусть появилась одиночная отметка (1) в некоторой точке зоны обзора РЛС. Очевидно, эту отметку необходимо принять за первую (начальную) отметку трассы новой цели. В следующем обзоре вторую отметку, принадлежащую той же трассе, следует искать в некоторой области, окружающей начальную отметку. Если Vц мин, Vц макс – соответственно минимальная и максимальная скорости интересующих нас целей,а Tо – период обзора РЛС, то область вероятного нахождения отметок в следующем обзоре можно представить в виде кольца, внутренний радиус которого Rмин= Vц мин.Tо, а внешний Rмакс = Vц макс.Tо. Полученную таким образом область принято называть экстраполированной зоной (ЭЗо)
Площадь кольца ЭЗо равна
S1 =π·То2.(Vц2макс – Vц2мин).
В область S1 может попасть не одна, а несколько отметок (2). Каждую из них следует считать как возможное продолжение трассы. По двум отметкам можно вычислить скорость и направление движения каждой из предполагаемых целей
Q = arctg(Δх/Δу) и предсказать (экстраполировать) положение отметки на следующий (третий) обзор.
Операция вычисления координат цели в последующих циклах обзора называется экстраполяцией координат, а точка пространства, соответствующая расчетным значениям координат цели-экстраполированной точкой (ЭТ). Очевидно, что очередная отметка (3) в общем случае не совпадет с экстраполированной точкой, т.к. вычисление упрежденной точки осуществляется с погрешностью, порождаемой ошибками вычисления параметров движения цели и ее маневренными возможностями. Поэтому для выделения (селекции) цели необходимо в окрестности экстраполированной точки ограничить некоторую достаточно малую область пространства вероятного нахождения цели-экстраполированную эону (ЭЗ1), которая называется стробом. Операция выделения экстраполированной зоны называется стробированием цели. Размеры ЭЗ1 можно взять меньшими, чем зоны ЭЗо, т.к. при определении зоны ЭЗ1 используется апостериорная информация о параметрах движения цели, полученная в предшествующих циклах обзора пространства.
При попадании отметок в к областей подряд принимается решение об обнаружении трассы цели и она передается на сопровождение. Описанный алгоритм можно рассматривать как обнаружение трассы по критерию «3 отметки из 3-х». Возможны и другие варианты логики обнаружения, например «3 из 4», «4 из 4», «2 из 3» и т.д.
В общем случае в строб может попасть несколько отметок, порождаемых ложными и другими целями. В связи с этим для продолжения траектории цели необходимо выбрать одну отметку из нескольких попавших в строб. С этой целью все отметки, попавшие в строб, сравнивают между собой по некоторому критерию и выбирают одну. Критерием сравнения обычно выбирают расстояние от центра строба (эллиптическое). Операцию сравнения отметок, попавших в строб, называют сличением или селекцией.
В отдельных случаях в стробе может не оказаться ни одной отметки. Тогда естественно экстраполированную точку принять за истинную и считать ее продолжением траектории движения цели.
После отбора в стробе одной «истинной» отметки необходимо уточнить (сгладить) координаты отметки и вычислить параметры трассы.
Сглаживание координат применяется, во-первых, для того чтобы по дискретным отметкам, принадлежность которых к трассе уже определена, выработать непрерывные данные о трассе и, во-вторых, для определения на основе использования информации из ряда смежных обзоров более точных значений координат.
Таким образом, для сглаживания координат используются закономерности (модели) движения летательных аппаратов и результаты измерений. Сглаженные значения координат и параметры трассы выдаются потребителю.
Наряду с задачами обнаружения, сопровождения целей и выдачи потребителям сглаженных значений координат и параметров трасс в процессе вторичной обработки может осуществляться прогнозирование (пролонгация) координат целей.
Прогнозирование понимается как экстраполяция на время, значительно большее, чем дискретность поступления отметок. Таким образом, в процессе автосопровождения каждой цели решаются следующие задачи:
1. Определение (оценка) сглаженных параметров трассы цели (координаты, курс, скорость, ускорение и т.д.);
2. Экстраполяция параметров трассы на один или несколько обзоров;
3. Выделение области, в которой с определенной вероятностью ожидается появление отметки в новом обзоре (стробирование);
4. Сличение параметров экстраполированной точки с параметрами отметок, попавших в строб, и выбор одной из них для продолжения трассы (селекция отметок в стробе).