

6.2 Принципы построения индикаторов обзорных рлс
В подразделе 6.1 показано, что для получения изображения на экране ИКО должен быть создан полярный растр, называемый радиально-круговой разверткой (РКР) электронного пучка. Если используются ЭЛТ с магнитным управлением, то необходимо создавать однородное отклоняющее магнитное поле, напряженность которого должна изменяться по закону, обеспечивающему необходимую радиальную развертку по дальности. При этом одновременно должен происходить относительно медленный поворот магнитного поля в плоскости, перпендикулярной оси трубки с угловой скоростью, равной угловой скорости вращения антенны по азимуту.
Для поворота и изменения напряженности магнитного поля на практике применяются следующие способы:
1. Способ вращающихся отклоняющих катушек (ОК), питаемых током неизменной амплитуды;
2. Способ неподвижных ОК (двух пар и более), питаемых током изменяющейся амплитуды.
6.2.1 Функциональный состав индикатора
Индикатор РЛС состоит из ряда электронных устройств, обеспечивающих выполнение возлагаемых на него функций.
Оконечным элементом индикатора является ЭЛТ. На трубку подаются:
напряжения или токи для создания разверток (растра);
видеосигналы с выхода приемника;
импульсы масштабных отметок;
сигналы формирования подвижного электронного маркера;
сигналы коммутации для изменения режимов работы;
напряжения, обеспечивающие исходный режим работы.
В соответствии с этим индикатор должен включать следующие основные устройства, которые часто называют каналами:
канал формирования разверток;
канал сигналов;
канал формирования электронного маркера;
канал коммутации;
устройство управления режимом работы трубки;
канал масштабных меток высоты.
Структурная схема обобщенного индикатора изображена на рис.6.8, где показаны также основные функциональные связи.
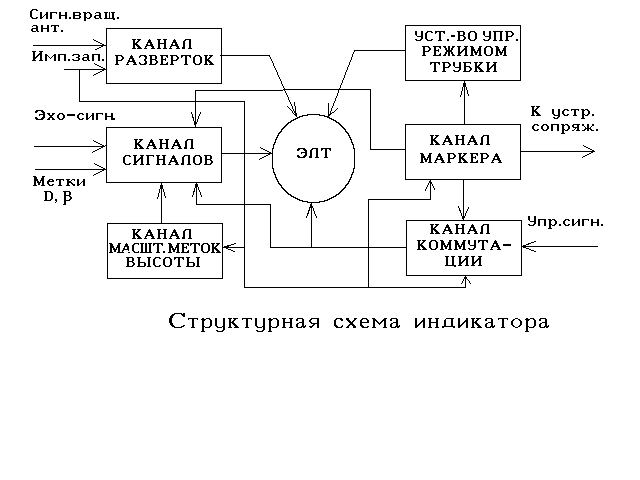
Рис.6.8. Обобщенная структурная схема индикатора
Канал формирования разверток является основным каналом индикатора и обеспечивает создание необходимого растра. Он может содержать или только устройство формирования развертки дальности, либо устройство, формирующее две развертки: развертку дальности и развертку угла (азимута или угла места). В общем случае напряжение или ток развертки являются функциями измеряемой координаты (дальности, азимута или угла места).
Если в индикаторе используется трубка с электростатическим управлением, то канал развертки формирует пилообразное напряжение развертки, подаваемое на горизонтально отклоняющие пластины трубки, вызывающее перемещение электронного пучка по экрану. В индикаторах дальности и одной угловой координаты, использующих трубки с магнитным управлением, канал разверток обеспечивает формирование двух разверток: развертки дальности и развертки угла. Отклонение электронного пучка осуществляется магнитным полем, которое создается изменяющимся током, протекающим в отклоняющих катушках. Начало формирования развертки дальности фиксируется импульсом запуска. Для создания угловой развертки обеспечивается дистанционная передача угла поворота антенны к отклоняющей системе трубки.
Канал сигналов предназначен для передачи усиленных приемником эхо-сигналов, импульсов масштабных отметок и импульсов маркерного сигнала к электродам трубки. В состав канала сигналов входит один или несколько каскадов видеоусилителя с цепями замешивания входных сигналов, ограничитель амплитуд и фиксирующие схемы. Структурная схема канала приведена на рис.6.9. Видеоусилитель в канале является дополнительной ступенью усиления сигналов. Ограничитель осуществляет ограничение слишком мощных сигналов (например, отраженных от мощных местных предметов), которые могут вызывать дефокусировку электронного пучка. Фиксирующая схема служит для сохранения постоянного потенциала на модулирующем электроде трубки или отклоняющих пластинах при изменении скважности импульсов.
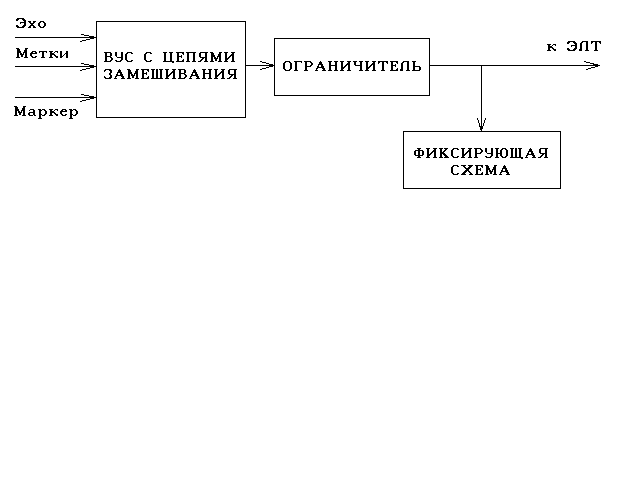
Рис.6.9. Структурная схема канала сигналов
Устройство управления режимом работы трубки обеспечивает питание трубки, возможность фокусировки электронного пучка, регулировки яркости изображения, а также возможность смещения начала развертки. Структурная схема устройства приведена на рис.6.10.
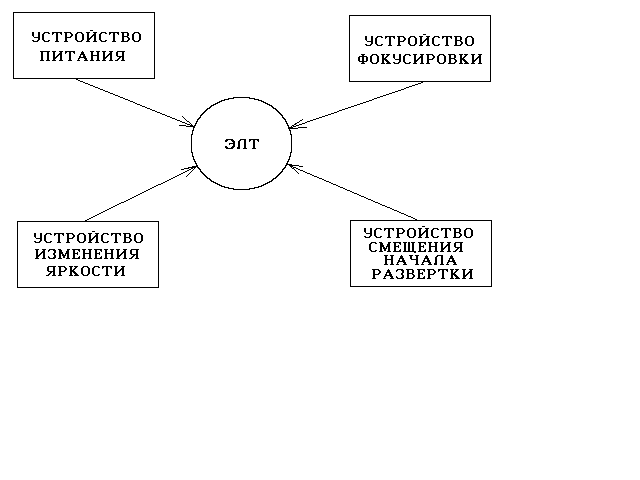
Рис.6.10. Структурная схема устройства управления режимом трубки
Канал формирования электронного маркера вырабатывает импульсы требуемой формы, задержанные на определенное время относительно моментов начала разверток. Эта задержка плавно регулируется и точно фиксируется, что дает возможность размещать маркер в любой точке экрана.
Структурная схема канала приведена на рис.6.11. Манипулятор положения маркера, перемещаемый вручную оператором, вырабатывает напряжения, соответствующие координатам положения маркера на экране индикатора. Эти напряжения управляют устройством задержки сигналов маркера, под воздействием которых формируется маркерный сигнал требуемой формы.
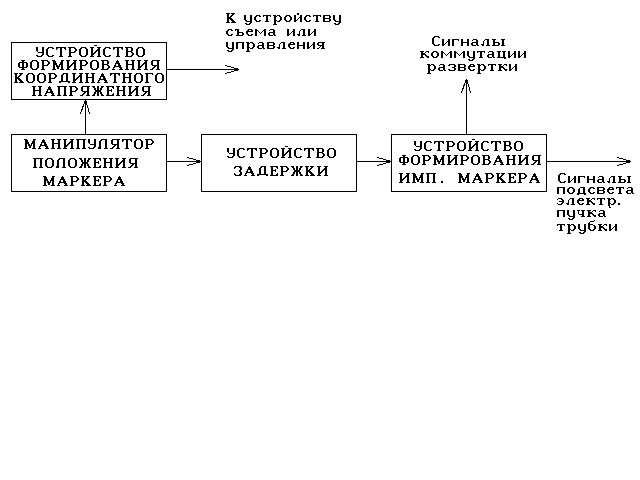
Рис.6.11. Структурная схема канала формирования электронного маркера
Маркерный сигнал поступает как в устройство коммутации разверток, так и для подсвета электронного пучка трубки через канал сигналов. В результате на экране индикатора в любой желаемой точке образуется маркерная метка заданной формы. В канале формирования маркера вырабатываются координатные напряжения, обеспечивающие полуавтоматический съем координат целей.
Канал коммутации обеспечивает воспроизведение на экране индикатора сигналов нескольких радиолокационных каналов, подвижных маркерных меток и других служебных сигналов. В РЛС обнаружения имеется необходимость воспроизводить на индикаторе сигналы от нескольких радиолокационных каналов, осуществляющих поиск в разных участках зоны обзора (в целях сокращения времени обзора). Поэтому канал коммутации обеспечивает получение двух и более быстрочередующихся изображений на экране трубки, имеющей один электронный пучок. Входящее в канал коммутации устройство формирования селекторных импульсов под воздействием импульсов запуска, сигналов, характеризующих положение антенны, и маркерных сигналов вырабатывает специальные импульсы, управляющие устройством переключения. Устройство переключения переключает сигналы, подаваемые на отклоняющую систему трубки, чем обеспечивается изменение закона движения электронного пучка, а также переключение эхо-сигналов радиолокационных каналов и сигналов подсвета, высвечивающих требуемое изображение на экране.
Канал масштабных меток высоты имеется только в индикаторах измерения высоты, что определяется спецификой формирования этих меток. Масштабные метки дальности и азимута в РЛС обнаружения формируются самостоятельными системами формирования масштабных меток и рассматриваются отдельно.