

4.4.2 Уменьшение уровня приема в направлении на постановщик ашп
Для снижения уровня помех, приходящих с направлений, не совпадающих с направлением на источник сигнала, можно использовать компенсационный метод, принцип которого заключается в следующем.
Приемная антенна система состоит из основной Аo и дополнительных А1, А2,..., Аn (рис.4.21,а). В каждом из дополнительных каналов приема включаются усилители с регулируемыми комплексными коэффициентами передачи К1, К2,..., Кn.

а) б)
Рис.4.21. Многоканальная система обработки сигналов:
а − обобщенная; б − на базе автокомпенсаторов
Колебания, прошедшие через соответствующие каналы, поступают на сумматор. Результирующая ДН FP(θ) такой антенной системы определяется соотношением
![]()
где Fi(θ) − диаграмма направленности i-го канала.
Для формирования провалов в заданных направлениях коэффициенты передачи должны удовлетворять следующей системе уравнений:
![]() (4.20)
(4.20)
Путем подбора коэффициентов К1, К2,...Кn, можно добиться образования провалов в результирующей ДН в направлении на ПАП при несущественном искажении главного лепестка диаграммы.
При m, n эта система уравнений будет иметь по крайней мере одно решение, если Fi(θ) выбраны с учетом требований, о которых будет сказано ниже. При m > n в общем случае система уравнений не будет иметь решения. Последнее означает, что для формирования в результирующей ДН провалов на N постановщиков активных помех необходимо иметь в общем не менее N дополнительных каналов приема со своими антеннами.
Для автоматического формирования провалов в результирующей ДН можно использовать автокомпенсаторы.
Обобщенная структурная схема устройства обработки выходных сигналов приемных каналов при применении автокомпенсаторов приведена на рис.4.21,б.
Предельно достижимый (потенциальный) коэффициент подавления АШП в такой системе составляет Кп = Рпо/Рп вых АК = Доо/Д п, где Рпо − мощность АШП на входе основного канала АК; Рп вых АК − мощность АШП на выходе АК; Доо − алгебраическое дополнение элемента ρ00 = 1 корреляционной матрицы входных помеховых сигналов.
В простейшем случае при n = 1 (один дополнительный канал приема)
Кп = 1/(1 − ρ201), (4.21)
где ρ01 − модуль коэффициента взаимной корреляции АШП на входах основного и дополнительного каналов АК, Д п − определитель корреляционной матрицы сигналов АШП на входах АК
 где
где

Принципы построения АК активных помех в основном аналогичны принципам построения АК пассивных помех. Однако специфика работы АК активных помех обуславливает ряд дополнительных требований к функциональным узлам и элементам аппаратуры защиты от активных помех на базе АК.
Рассмотрим основные требования к АК.
1. Требования к идентичности задержек сигналов в основном и дополнительных каналах приема.
Наличие временного рассогласования каналов приема приводит к снижению коэффициента взаимной корреляции сигналов АШП на входах АК, а следовательно, и коэффициента подавления.
2. Требования к чувствительности дополнительных каналов приема.
Чувствительность дополнительных каналов приема должна быть не ниже чувствительности основного канала приема. Это требование обеспечивается путем включения в дополнительные канала до входа АК тех же элементов, что и в основной канал (УВЧ, смеситель, ПУПЧ).
3. Требования к коэффициенту усиления антенн дополнительных каналов приема.
Собственные шумы дополнительных каналов приема оказывают декоррелирующее влияние на АШП, что ведет к снижению коэффициента подавления. Для увеличения отношения мощности АШП к мощности собственных шумов дополнительных каналов необходимо повысить коэффициент усиления антенн дополнительных каналов.
Выполнение этого требования связано с увеличением размеров антенны, что не всегда допустимо, поэтому приемлемо условие Gд(θ) ≥ Gбок max, где Gд(θ) − коэффициент усиления антенн дополнительного канала, Gбок max − максимальный коэффициент усиления антенн основного канала по боковым лепесткам ДНА.
4. Требования к ДНА дополнительных каналов приема.
Чтобы система уравнений вида (4.20) была невырожденной (т.е. чтобы она имела решение), антенны дополнительных каналов приема должны иметь различные либо амплитудные, либо фазовые ДН.
Из-за сравнительно низкой направленности этих антенн реализация амплитудных различий представляет собой достаточно сложную задачу. Проще реализовать отличие фазовых диаграмм. Для этого достаточно разнести фазовые центры дополнительных каналов приема (рис.4.22). Следует помнить, что разнос фазовых центров антенн приводит к возникновению относительного временного сдвига сигналов АШП на входах приемных каналов, т.е. к снижению коэффициента подавления. Этот сдвиг можно оценить по формуле
δtфц = d cos θ/c = Δr/c,
где d − расстояние между фазовыми центрами антенн (см. рис. 4.22).
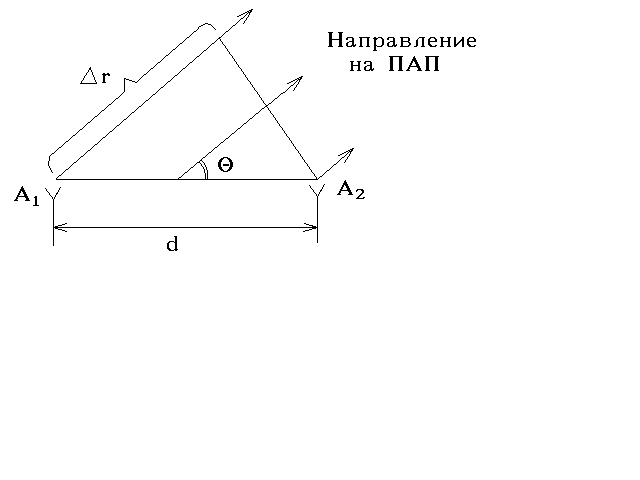
Рис.4.22. К вопросу обеспечения требований к ДНА дополнительных каналов приема
5. Требования к быстродействию.
Динамическая постоянная АК должна удовлетворять условию
τи < Tдин < Tп.
Выполнение левого неравенства исключает возможность ослабления полезного сигнала и повышает запас устойчивости АК.
Выполнение правого неравенства обеспечивает возможность компенсации относительных амплитудных и фазовых изменений сигналов АШП на входах каналов приема, обусловленных вращением антенны РЛС.
При выполнении этих условий АК успевает реагировать на изменение амплитуд и фаз помеховых сигналов в обоих каналах и не компенсировать полезный сигнал.
АК активных помех работает в условиях изменения мощности помехи на его входах в большом диапазоне (десятки дБ). Эта особенность вызывает необходимость принятия мер по обеспечению требуемого быстродействия АК при малых уровнях помеховых сигналов и исключения самовозбуждения при больших.
Таким образом, физическая сущность подавления помех в АК заключается в сдедующем. При нахождении цели и источника помех в главном луче ДН амплитудно-фазовые соотношения сигналов и помех, принятых основной и вспомогательными антеннами, одинаковы и поэтому происходит ослабление, как помех, так и полезных сигналов.
Оказывается, что все же можно достигнуть ослабления помех, принимаемых по главному лепестку ДН, без заметного ослабления полезного сигнала, если использовать имеющиеся поляризационные различия полезных сигналов и помех.
Поляризационная селекция. Поляризационную структуру ЭМВ определяют следующие параметры (рис.4.23,а):
угол пространственной ориентации эллипса поляризации j;
коэффициент эллиптичности сигнала Кэл = a/b ≤ 1;
направление вращения вектора напряженности электрического поля.

а) б)
Рис.4.23. Параметры эллипса поляризации ЭМВ (а) и упрощенная структурная схема поляризационного селектора (б)
Выбором указанных параметров, а также их соответствующим изменением можно добиться существенного ослабления воздействия активных помех.
Принцип поляризационной селекции состоит в следующем.
Антенная система РЛС настраивается на прием сигнала определенной поляризации, в общем случае эллиптической. Помеха максимально ослабляется, если поляризация антенной системы будет ортогональна поляризации помехи: для вертикальной поляризации помехи − горизонтальная, для круговой поляризации − круговая с противоположным вращением вектора напряженности поля, для эллиптически поляризованной волны ортогональным является также эллиптически поляризованное колебание, но со сдвинутым на 90 градусов положением осей. Структурная схема поляризационного селектора показана на рис.4.23,б.
Ортогональные составляющие ЭМВ выделяются соответствующими поляризационными фильтрами и суммируются с соответствующими весами К1 и К2. Путем подбора весовых коэффициентов можно получить требуемую поляризацию приемной антенной системы. Для разделения ЭМВ на две ортогональные линейно-поляризованные компоненты в основном применяются различного рода тройниковые переходы с волновода круглого сечения на две ортогонально расположенных прямоугольных волновода (рис.4.24,а − разделитель поляризации на линейные ортогонально поляризованные компоненты (поперечное сечение).

а) б)
Рис.4.24. Вид поля волны ТЕ11 в поперечном сечении разделителя (а) и упрощенная структурная схема поляризационного селектора на основе автокомпенсатора (б)
Для автоматической установки весовых коэффициентов в поляризационном селекторе можно использовать автокомпенсаторы (рис.4.24,б).
Упрощенная структурная схема автоматического поляризационного селектора, используемого в РЛС 5Н84А, показана на рис.4.25. Принципиальными элементами такого устройства являются двухканальная антенна, способная принимать колебания с двумя взаимно ортогональными поляризациями, и автокомпенсатор. В качестве передающей антенны станции можно использовать одну из них. Второй (вспомогательный) канал работает только на прием. В случае линейно поляризованной волны (рис.4.26) между ортогональными составляющими помехи UmX = cos(ωot + φx) и UmY = cos(ωot + φy) имеется корреляция.

Рис.4.25. Поляризационный автокомпенсатор
Таким образом, благодаря действию корреляционной обратной связи, составляющая помехи, поляризация которой совпадает с поляризацией зондирующего сигнала, компенсируется помехой, принятой вспомогательной антенной с ортогональной поляризацией. Полезный сигнал частично ослабляется при прохождении через автокомпенсатор, но не компенсируется. Это обусловлено тем, что динамическая постоянная времени автокомпенсатора обычно значительно больше длительности отраженного сигнала (и АК не успевает перестраиваться за время действия сигнала), а соотношение ортогональных составляющих полезного сигнала другое, чем для помехи.

Рис.4.26. Ортогональные составляющие помехи
Метод поляризационной селекции, в отличие от пространственной можно использовать и для защиты РЛС от АШП по основному лепестку ДНА.