

5.1.3 Обобщенная структурная схема системы цифровой обработки информации
В обзорных РЛС сигнал, отраженный от цели, имеет естественную дискретизацию по времени, обусловленную перемещением ДНА РЛС в азимутальной плоскости и импульсным методом дальнометрии. Искусственной дискретизации по времени подвергается сигнал на выходе приемника РЛС в пределах одного цикла зондирования (в пределах интервала времени tr max, где tr max − максимальное время запаздывания отраженного сигнала). Это приводит к разбиению всей дальности на элементарные участки шириной r. Число таких участков Nr = R/r, где R − максимальная дальность обнаружения; r − сТД/2 − размер элементарного участка по дальности; ТД − интервал временной дискретизации.
Сигналы каждого участка квантуются по амплитуде, преобразуются в цифровую форму и запоминаются на время, необходимое для их обработки.
При вращении антенны по азимуту каждый элементарный участок образует так называемое кольцо дальности (канал дальности). При решении задач фильтрации полезных сигналов, обнаружения целей и измерения их координат используется информация с кольца дальности в пределах азимутального сектора, равного ширине ДНА РЛС в горизонтальной плоскости. Информация в каждом кольце дальности обрабатывается от одного цикла зондирования к другому таким образом, чтобы к началу очередного цикла она заканчивалась на всех интервалах дальностей.
Обработка сигналов во всей зоне обзора РЛС возможна либо путем последовательного анализа информации на различных интервалах дальностей, либо путем параллельного включения устройств обработки в каждое кольцо дальности. При первом способе требуется меньший объем аппаратуры, однако существенно (на 2-3 порядка) возрастают требования к быстродействию. При параллельной обработке пропорционально числу дальномерных каналов Nr уменьшаются требования к быстродействию, но растет объем аппаратуры. Возможен также последовательно-параллельный способ обработки, обеспечивающий определенный компромисс между быстродействием и объемом аппаратуры. Выбор того или иного способа зависит от многих факторов и определяется, с одной стороны, техническими параметрами РЛС, такими как база сигнала, число импульсов в пачке, требуемый коэффициент подавления помех в аппаратуре защиты, допустимый уровень потерь энергии полезных сигналов и т.д., а с другой стороны − наличием и уровнем развития элементной базы.
Следует отметить, что независимо от технической реализации в основе работы устройств линейной цифровой обработки лежит принцип весового (взвешенного) суммирования. Значения весовых коэффициентов определяют характеристики устройства обработки (импульсную, амплитудно-частотную и фазочастотную) и выбираются таким образом, чтобы обеспечить оптимальную или квазиоптимальную фильтрацию полезных сигналов на фоне различного рода помех.
Для реализации устройства цифровой обработки сигналов необходимо иметь:
запоминающее устройство (ЗУ) входных сигналов;
ЗУ весовых коэффициентов;
ЗУ выходных сигналов;
арифметическое устройство (АУ) для выполнения операций умножения значений сигнала на весовые коэффициенты и суммирования;
оперативное ЗУ (ОЗУ) для хранения результатов промежуточных вычислений и команд;
устройство управления, обеспечивающее необходимую последовательность работы системы обработки.
Несмотря на сложность технической реализации, использование таких устройств в РЛС является обязательным и особенно в аппаратуре защиты от помех при когерентной обработке сигналов. При обнаружении целей и измерении их координат в отсутствии помех, как правило, используется некогерентная обработка бинаро-квантованных сигналов, имеющая при некотором увеличении потерь в отношении сигнал-шум существенно более простую техническую реализацию.
Обобщенные структурные схемы систем цифровой обработки радиолокационных сигналов и ее основного функционального элемента − цифрового фильтра (ЦФ) представлены соответственно на рис.5.2 и 5.3.

Рис.5.2. Структурная схема системы цифровой обработки
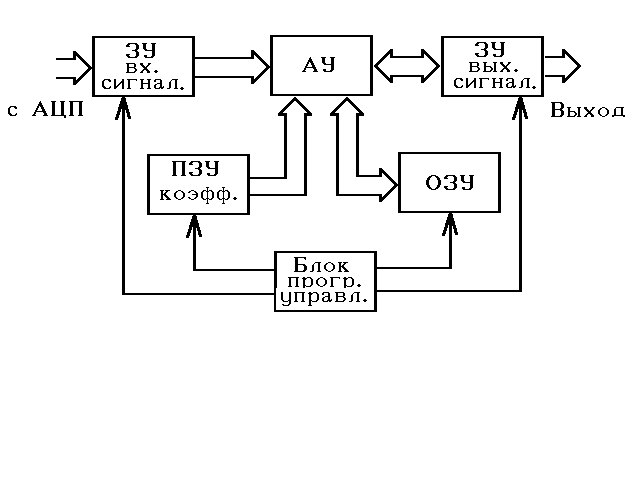
Рис.5.3. Структурная схема цифрового фильтра
Таким образом, обработка сигналов во всей зоне обзора РЛС возможна либо путем последовательного анализа информации на различных интервалах дальностей, либо путем параллельного включения устройств обработки в каждое кольцо дальности. При первом способе требуется меньший объем аппаратуры, однако существенно (на 2-3 порядка) возрастают требования к быстродействию. При параллельной обработке пропорционально числу дальномерных каналов Nr уменьшаются требования к быстродействию, но растет объем аппаратуры. Возможен также последовательно-параллельный способ обработки, обеспечивающий определенный компромисс между быстродействием и объемом аппаратуры.
Для реализации устройства цифровой обработки сигналов необходимо иметь следующие устройства: запоминающее устройство (ЗУ) входных сигналов; ЗУ весовых коэффициентов; ЗУ выходных сигналов; арифметическое устройство (АУ) для выполнения операций умножения значений сигнала на весовые коэффициенты и суммирования; оперативное ЗУ (ОЗУ) для хранения результатов промежуточных вычислений и команд; устройство управления, обеспечивающее необходимую последовательность работы системы обработки.