

Количество движения
Количество движения — векторная мера механического движения, характеризующая переход механического движения одного материального объекта в механическое движение другого объекта. Количеством движения материальной точки называется вектор, равный произведений массы точки на ее скорость q = m v . Для механической системы геометрическая сумма количеств движения ее точек называется главным вектором количества движения
Q = ∑qk = ∑mk vk = ∑mk rk . k k k
Главный вектор количества движения механической системы является свободным вектором, не имеющим определённой точки приложения. Вели-
чину и направление главного вектора количества движения механической
системы можно определить через скорость центра масс vC по формуле
Q = m vC .
При сложном движении тела векторQ , характеризует только посту-
пательное движение тела вместе с центром масс и не может характеризовать вращательное движение вокруг центра масс.
Кинетический момент
Вращательное движение системы вокруг ее центра масс характеризует другая мера механического движения — кинетический момент.
Кинетическим моментом системы относительно неподвижного цен-
тра O называется геометрическая сумма моментов количества движения
всех точек этой системы, взятых относительно того же центра
KO = ∑rk ×mk vk . k
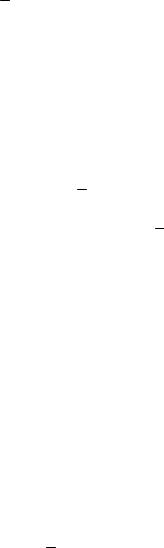
Если материальная система совершает произвольное движение в пространстве, то такое движение можно представить в виде суммы посту-
90
пательного движения вместе с центром масс и относительного движения вокруг центра масс (рис. 3. 3). Кинетический момент механической системы в этом случае можно представить в виде
KO = ∑rk ×mk vk = rC ×m vC + KCr . k
Вектор KCr = ∑ρk ×mk vkr называется кинетическим моментом систе-
k
мы в относительном по отношению к центру масс движении.
|
|
|
mk |
v |
|
|
|
ζ |
k |
|
|
|
|
|
|
|
|
vC |
r |
z |
|
|
ρk |
vk |
|
|
|
||
|
r k |
rC |
С |
η |
|
|
|
||
|
|
vC |
|
|
|
|
|
|
|
O |
|
|
ξ |
|
|
|
y |
|
|
x |
|
|
|
|
|
|
|
|
Рис. 3. 3. Разложение сложного движения на переносное и относительное.
При вращении твердого тела вокруг неподвижной оси (напримерOz ),
кинетический момент тела будет равен произведению угловой скорости на момент инерции тела, вычисленный относительно той же оси
KO z = IO zω,
где IO z — момент инерции твердого тела относительно оси вращения.
Знак кинетического момента совпадает со знаком угловой скорости.
Кинетическая энергия
Кинетической энергией системы называется сумма кинетических
энергии всех точек системы
T = ∑ |
m v2 |
||
k k |
. |
||
2 |
|||
k |
|
||
Это основная скалярная мера механического движения.
91

Кинетическая энергия механической системы в общем случае произвольного движения (рис. 3. 3) равна сумме кинетической энергии в поступательном движении системы со скоростью центра масс и кинетической
энергии этой системы в относительном движении, наблюдаемом из под-
вижной системы отсчёта (поступательно движущейся вместе с центром масс) — теорема Кенига
|
m v2 |
m vr2 |
|||
T = |
|
C |
+ ∑ |
k k |
. |
2 |
|
2 |
|||
|
|
k |
|
||
• если тело движется поступательно, то скорости всех его точек одина-
ковы и равны скорости центра масс, поэтому |
|||
T = |
m v2 |
||
C |
. |
||
2 |
|||
|
|
||
• при вращательном движении твёрдого тела вокруг неподвижной
осиOz , скорость точек определяется по формулеvk |
=ω hk . Поэтому |
|||||||||
T = ∑ |
m v2 |
= ∑ |
m h 2 |
ω |
2 |
= |
1 |
IO zω |
2 |
. |
k k |
k k |
|
|
|
||||||
2 |
2 |
|
2 |
|
||||||
k |
k |
|
|
|
|
|
|
|||
Здесь IOz — момент инерции твёрдого тела относительно оси Oz
• если тело участвует в плоскопараллельном движении, то его кинетиче-
скую энергию можно определить по теореме Кёнига
T = ∑ |
m v2 |
|
1 |
2 |
|
1 |
2 |
|
|
k k |
= |
|
m vC |
+ |
|
ICzω |
, |
||
2 |
2 |
2 |
|||||||
k |
|
|
|
|
|
где ω — угловая скорость при вращении тела вокруг центра масс.
Элементарный и полный импульс силы
Действие силы F на материальную точку в течение промежутка вре-
мени dt можно охарактеризовать элементарным импульсом силы d S = F dt .
Полный импульс силы F за промежуток времени t −t0 равен
92

t
S = ∫F dt .
t0
Работа силы
Элементарной работой силы F называется скалярная величина, рав-
ная скалярному произведению вектора силы F на элементарное переме-
щение точки приложения силы
δ A = F d r δ A = F cos(ϕ)d r = Fτ d r ,
где ϕ — угол между векторами F иd r , Fτ — проекция вектора силы на направление единичного вектора касательной к траектории.
Производя скалярное умножение, получим ещё одно представление
для величины элементарной работы
δ A = Fx d x + Fy d y + Fz d z .
По внешнему виду эта формула напоминает полный дифференциал функции координат точки, но, тем не менее, в общем случае элементарная
работа не является полным дифференциалом.
Элементарная работа силы, действующей на механическую систему, на возможном перемещении
δ A = Fk δ rk .
Полную работу силы на конечном перемещении можно найти по
формуле
M |
|
|
|
|
|
|
|
|
A = ∫ F cos(ϕ)d r = ∫Fτ d r = ∫(Fx d x + Fy d y + Fz d z). |
||||||||
MO |
|
|
|
|
|
|
|
|
Введём ещё одно понятие — мощность силы, величина которой ха- |
||||||||
рактеризует изменение работы в единицу времени |
||||||||
|
d A |
|
|
|
|
|
|
|
|
|
F |
v d t |
|
|
n |
||
|
|
|
||||||
N = |
|
или N = |
|
|
|
= F v = F v cos(F,v )= Fτ v . |
||
d t |
|
|
d t |
|||||
|
|
|
|
|
|
|
||
93