


мгновенно поступательное движение, которое отличается от поступательного движения тем, что ускорения различных точек при этом не обязательно равны:
AP = BP → ∞, |
ω = |
vA |
= |
vA |
= 0. |
AP |
|
||||
|
|
|
∞ |
||
Если скорости двух точек антипараллельны, то (см. рис.1.14 в)
ω = APvA = BPvB .
Теорема об ускорениях точек плоской фигуры
Ускорение произвольной точки твёрдого тела, участвующего в плоском движении, можно найти как геометрическую сумму ускорения полюса и ускорения данной точки во вращательном движении вокруг полюса.
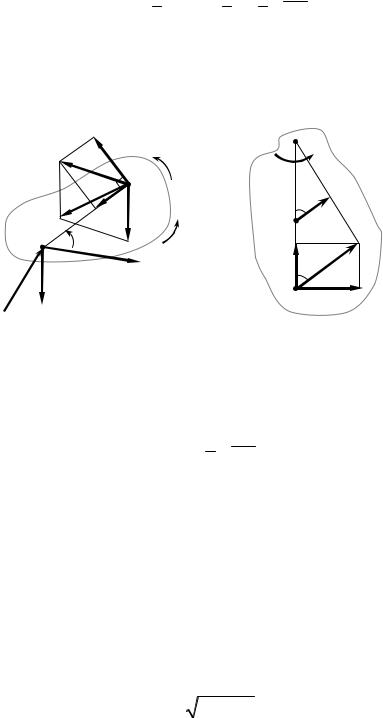
Для доказательства этого положения используем теорему сложения ускорений течки в составном движении. Примем за полюс точку A . Подвижную систему координат будем перемещать поступательно вместе с полюсом (рис.1.15 а). Тогда относительным движением будет вращение вокруг полюса. Известно, что кориолисово ускорение в случае переносного поступательного движения равно нулю, поэтому
a = a e +a r .
Т.к. в поступательном движении ускорения всех точек одинаковы и равны ускорению полюса, имеемaBe = aA .
Ускорение точки при движении по окружности удобно представить в виде суммы центростремительной и вращательной составляющих:
aBr = aBA = aBAц + aBAвр .
Следовательно
aB = aA + aBA = aA + aBAц + aBAвр .
Направления составляющих ускорения ( )B показаны на рис.1.15 а.
34
Нормальная (центростремительная) составляющая относительного ускорения определяется формулой
aBAn = aBAц =ω ×vBA =ω ×(ω × AB)
Величина его равна aBAц =ω2 AB Вектор aBAц |
направлен вдоль отрезка АВ к |
||||||||
полюсу А (центром вращения ( )B вокруг ( )A является( )A ). |
|||||||||
|
aBA |
|
aBAτ |
ω |
A ε |
|
|||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
|
|
|
aB |
|
|
B |
|
|
aCA |
|
η |
|
|
|
|
|
α |
||
|
|
aBAn |
aA |
С |
|
||||
|
|
|
|
|
|
||||
|
A |
|
ϕ |
|
ξ |
|
aBA |
||
y |
|
|
ε |
|
|
||||
|
|
|
|
|
|
|
|||
r |
|
|
|
vA |
aBAц |
α |
|
||
|
A |
|
|
|
|
|
|
|
|
|
|
aA |
|
|
|
a) |
B |
aBAвр |
|
|
|
|
|
|
|
||||
O |
|
|
|
x |
|
б) |
|||
|
|
|
|
||||||
Рис. 1. 15. Теорема о сложении ускорений (а) ее следствия (б)
Касательная (вращательная) составляющая относительного ускорения определяется формулой
aBAτ = aBAвр = ε × AB .
Модуль этого ускорения находится через угловое ускорениеaBAвр =ε AB .
Вектор aBAвр направлен перпендикулярно к АВ в сторону углового ускоре-
ния (в сторону угловой скорости, если движение ускоренное и в противоположную сторону вращения, если движение замедленное).
Величина полного относительного ускорения определяется по теореме Пифагора:
aBA = AB ε2 +ω4 .
Вектор относительного ускорения любой точки плоской фигуры отклонён от прямой, соединяющей рассматриваемую точку с полюсом на уголα , определяемый формулой
35