

наклона относительного ускорения и ускорения полюса А к прямой, соединяющей точку Q, с полюсом А одинаковы.
tg α = |
aQAвр |
ε |
, AQ = |
aQA |
= |
aA |
, aQ = 0 . |
|
|
= |
|
|
|
||||
aQAц |
ω2 |
ε2 +ω4 |
ε2 +ω4 |
|||||
Примеры нахождения МЦУ.
Рассмотрим способы нахождения положения МЦУ.
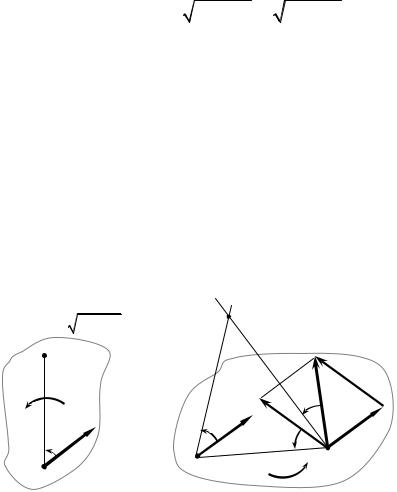
Пример №1: известныaA , ε ,ω aB (рис.1.16 а).
Определяем уголα = arctg (ε ω2 ). Откладываем угол α в направлении уг-
ω2 ). Откладываем угол α в направлении уг-
лового ускорения (т. е. в сторону вращения при ускоренном вращении и против — при замедленном), от направления известного ускорения точки и строим луч. На построенном луче откладываем отрезок длиной AQ.
AQ = |
aA |
|
|
Q (МЦУ) |
|
|
ε2 + ω4 |
|
|
|
|||
|
|
|
|
|
|
|
Q (МЦУ ) |
|
|
|
|
|
|
|
|
|
|
|
aB |
aBA |
ε |
|
|
|
|
|
|
|
|
|
|
α |
aA |
|
|
aA |
|
α |
|
||
α |
|
aA |
aBA |
|
||
|
А |
|
α |
B |
||
А |
а) |
|
|
|
||
|
|
|
ε |
б) |
||
|
|
|
|
|||
Рис. 1. 16. Примеры нахождения МЦУ: пример №1 (а), пример№2 (б)
Пример № 2. Известны ускорения двух точек А и В: aA иaB (рис.1.16 б).
Одну из точек с известным ускорением принимаем за полюс и определяем относительное ускорение другой точки путём геометрических построений. Измерением находим угол α и под этим углом проводим лучи от известных ускорений. Точка пересечения этих лучей является МЦУ. Угол откладывается от векторов ускорений в ту же сторону, в какую идёт угол от вектора относительного ускорения к прямой ВА.
Следует отметить, что МЦУ и МЦС разные точки тела, причём ускорение МЦС не равно нулю и скорость МЦУ не равна нулю (рис 1.17).
37

vC = const aC = 0, ε = 0, |
( )C →МЦУ |
α = 0, aP =ω2 CP, vP = 0, |
( )P →МЦС. |
C Q (МЦУ) vC
aP
PМЦС
Рис. 1. 17. Положение МЦС и МЦУ в случае качения катка без скольжения
В тех случаях, когда ускорения точек параллельны друг другу возможны следующие частныйслучаи нахождения МЦУ (рис.1.17)
aA |
aB |
|
|
|
aA |
|||||
Q (МЦУ)→ ∞ |
Q (МЦУ) |
|||||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
A |
|
|||
A |
B |
|
|
|||||||
а) |
aB б) |
|||||||||
|
|
|
|
|
aA |
|
|
|||
|
|
|
|
|
|
aB |
|
|
||
|
|
|
|
|
|
|
|
Q (МЦУ) в) |
||
|
|
|
A |
B |
||||||
Рис. 1. 18. Частные случаи нахождения МЦУ:
а) ускорения двух точек параллельны и равны; б) ускорения двух точек антипараллельны; в) ускорения двух точек параллельны, но не равны
38