

|
|
|
|
|
|
|
|
|
′ |
|
′′ |
|
|
′ |
|
|
|
′ |
|
′′ |
|
|
|
|
′′ |
|
|
|
|
|
|
|
′ |
|
′′ |
} |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
MO ≡{MO ; MO } |
MO |
≡{P ; P } |
{P; P } ≡ 0 |
{P; MO } ≡{P ; MO |
|||||||||||||||||||||||||||||||||||
|
|
|
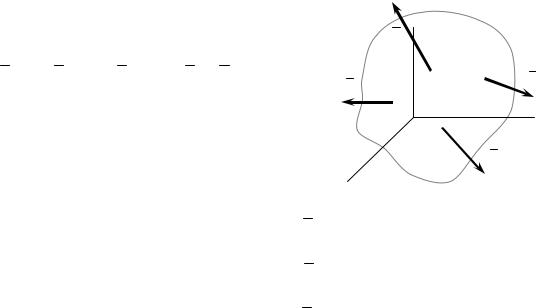
В этом случае система приводится к динаме, ось которой отстоит от |
|||||||||||||||||||||||||||||||||||||
первоначального центра приведения на расстоянии |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
O O = d = |
|
M ′ |
MO sin (α) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
P |
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Сведём все случаи, рассмотренные выше, в таблицу: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
1 |
|
|
|
P |
≠ 0 , M |
O ≠ 0 |
|
|
|
|
Равнодействующая |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
2 |
|
|
|
|
|
|
|
|
|
O ≠ 0 |
|
|
|
|
Пара сил |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
P |
= 0 , M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
3 |
|
|
|
|
|
|
|
|
|
O ≠ 0 , α =π / 2 |
|
Равнодействующая |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
P |
≠ 0 , M |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
4 |
|
|
|
|
|
|
|
|
|
O = 0 |
|
|
|
|
Равновесие |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
P |
= 0 , M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
5 |
|
|
|
|
|
|
|
|
|
O ≠ 0 , α ≠π / 2 |
|
Динама |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
P |
≠ 0 , M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
Условия равновесия произвольной системы сил |
|
|||||||||||||||||||||||||||||||||||
|
|
|
Геометрические условия равновесия, как это видно из предыдущего |
|||||||||||||||||||||||||||||||||||||
пункта, соответствуют двум векторным уравне- |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
ниям |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
z |
|
||||||||||||||||||
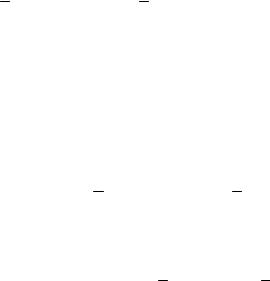
P = ∑Fk = 0 , MO = ∑MO (Fk )= 0
k |
k |
Проектируя эти уравнения на оси декартовой системы координат, получим шесть независимых уравнений равновесия
F1 |
Fk |
O
y
Fn
x
∑Fkx |
= 0, |
∑MOx (Fk )= 0, |
k |
|
k |
∑Fky |
= 0, |
∑MOy (Fk )= 0, |
k |
|
k |
∑Fkz |
= 0, |
∑MOz (Fk )= 0. |
k |
|
k |
Таким образом, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы равнялись нулю суммы проек-
58
ций всех сил на выбранные координатные оси и суммы моментов всех сил относительно этих осей.
Различные типы систем сил и условия их равновесия:
•пространственная система сходящихся сил. Выбираем начало координат совпадающее с точкой пересечения линий действия сил, входящих в рассматриваемую систему. Момент каждой из этих сил относительно любой оси, проходящей через начало отсчёта (пересекаемой линией действия силы), равен нулю. Поэтому три из шести уравнений равновесия выполнятся тождественно и условиями равновесия в этом случае будут:
∑Fkx |
= 0, ∑Fky |
= 0, ∑Fkz = 0. |
k |
k |
k |
•пространственная система параллельных сил. Выбираем систему координат так, чтобы одна из осей (например,Oz ) была направлена параллельно силам. Проекции сил на оси Ox и Oy равны нулю, момент лю-
бой из сил, параллельной оси, относительно этой оси равен нулю. Поэтому из шести уравнений равновесия получаем три условия:
∑MOx (Fk )= 0, ∑MOy (Fk )= 0, ∑Fkz = 0.
k k k
•произвольная плоская система сил. Совместим одну из координатных плоскостей (напримерxOy ) с плоскостью действия сил, тогда, очевид-
но, будут тождественно равными нулю следующие параметры произвольной силы:
∑Fkz |
≡ 0, ∑MOx (Fk )≡ 0, ∑MOy (Fk )≡ 0. |
|
k |
k |
k |
Поэтому условия равновесия запишутся в виде трёх уравнений:
∑Fkx |
= 0, ∑Fky |
= 0, ∑MOz (Fk )= ∑MO (Fk )= 0. |
|
k |
k |
k |
k |
59