


244
|
r 2 |
r 2 |
2r |
r |
r |
|
|
||
R2 |
yx1 |
yx2 |
|
yx1 |
yx2 |
x1x2 |
; |
(6.207) |
|
|
1 r |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|||
|
|
|
x x |
|
|
|
|
||
|
|
|
|
1 |
2 |
|
|
|
|
R2 |
r |
|
2 |
r |
, |
|
|
(6.208) |
|
|
|
1 yx |
|
yx |
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
где ryx1 , ryx2 , rx1x2 - парные коэффициенты корреляции;
β1, β2 - стандартизированные коэффициенты множественной регрессии.
В применении корреляционно-регрессионного анализа можно выделить следующие этапы:
-первый (начальный) этап: качественный анализ явления (события, процесса), выявление результативного и факторных признаков;
-второй этап: построение модели связи на основе корреляционных таблиц и полей;
-третий этап: исследование модели связи, оценка тесноты связи и значимости коэффициентов уравнений регрессии;
-четвертый (заключительный): интерпретация результатов исследования модели связи.
Использование информационных технологий превращает регрессионно-корреляционный анализ в мощный инструмент исследования явлений (событий, процессов) в системе эксплуатации вооружения КВ.
Основное значение этого метода при эксплуатации – прогнозирование результативного признака модели, что является необходимым условием принятия решения.
6.9Прогнозирование состояния системы с использованием марковских процессов и уравнений Колмогорова
Пусть имеется некоторая система S, которая с течением времени меняет свое состояние, т.е. переходит из одного состояния в другое, причем заранее неизвестным, случайным образом, то говорят, что в системе протекает случайный процесс.
Случайный процесс, протекающий в системе, называется марковским32 (рисунок 6.52), если для любого момента времени t0 вероятностные характеристики процесса в будущем зависят только от его состояния в данный момент времени t0 и не зависят от того, когда и как система пришла в это состояние.
32 Названы по фамилии русского математика А.А. Маркова, впервые сформулировавшим в 1906 году основное свойство этих процессов.
245
t < t0 (прошлое) |
t > t0 (будущее) |
0 |
t0 |
t0+ |
|
(S0) |
(S1) |
Рисунок 6.52 – Марковский случайный процесс |
||
Пусть в настоящий момент t0 |
система находится в со- |
|
стоянии S0, через некоторое случайное время она перейдет в состояние S1. Если процесс марковский, то можно предсказать состояние, учитывая только настоящее состояние системы и забыв о его предыстории (поведении системы при t t0). Само состояние S0 зависит от прошлого, но как только оно достигнуто, о прошлом можно забыть.
Если возможные состояние системы можно пронумеровать и переход системы из состояния в состояние происходит мгновенно, то такой процесс называется марковским с дискретными состояниями и непрерывным временем.
Для иллюстрации используем систему (техническое
устройство) |
с двумя возможными состояниями: работоспо- |
||||||||
|
|
|
|
|
собное |
и |
неработо- |
||
|
|
|
|
способное. |
Пример |
||||
|
|
|
|
|
такого |
|
процесса: |
||
|
|
|
|
|
восстанавливаемый |
||||
|
|
|
|
|
объект в случайный |
||||
|
S |
|
|
S |
|||||
|
|
|
момент |
|
времени |
||||
|
|
|
|
|
может |
перейти |
из |
||
|
|
|
|
|
|||||
|
|
|
|
|
работоспособного S0 |
||||
|
|
|
|
с |
интенсивностью |
||||
|
|
|
отказов = 1/Т0, где |
||||||
|
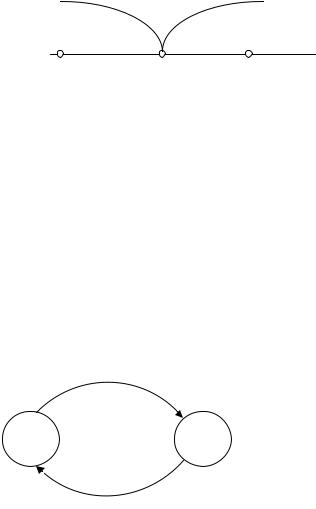
Рисунок 6.53 – Граф состояний |
||||||||
|
Т0 |
– средняя нара- |
|||||||
|
|
|
системы |
||||||
|
|
|
ботка |
на |
отказ, |
в |
|||
|
|
|
|
|
|||||
неработоспособное состояние S1, т.е. произойдет отказ объекта. Как только восстанавливаемый объект откажет, начинается его восстановление – перевод из неработоспособного S1 в работоспособное состояние S0 с интенсивностью восстановления = 1/Тв, где Тв
– среднее время восстановления.

246
Построим граф состояний (рисунок 6.53), для чего обозначим состояния системы кружками, а возможные переходы стрелками, соединяющими состояния.
Имея граф состояний системы, легко получить математическую модель процесса. Система S имеет два состояния S0 и S1, вероятности нахождения в которых соответственно рав-
ны р0 и р1. Так как состояния S0 и S1 |
образуют полную группу |
||||
событий, то для любого момента времени |
|||||
p |
0 |
t p |
0 |
t 1 33. |
(6.209) |
|
|
|
|
||
Придадим времени t малое приращение t и найдем вероятность того, что в момент (t + t) система будет находиться в состоянии S0, т.е. p0(t + t). Это может произойти двумя вариантами: 1) в момент времени t система была в S0 и за время t не вышла из него; 2) в момент времени t система была в S1 и за время t перешла в S0. Вероятность первого варианта равна произведению вероятности p0(t) нахождения в состоянии S0 на вероятность того, что система за время t не перейдет из состояния S0 в S1 [1 - t], т.е. p0(t) . [1- t]. После аналогичных рассуждений для второго варианта получим p1(t)
. t. Складывая вероятности обоих вариантов (по правилу сложения вероятностей) получим
p0 t t p0 t 1 t p1 t t |
. |
|||||
|
|
|
|
|
|
|
После преобразований получим |
|
|
|
|
||
|
p0 t t p0 t |
p1 |
t p0 |
t |
|
|
|
t |
|
|
|||
|
|
|
. |
|
||
Устремляя t к нулю, получим дифференциальное уравнение |
||||||||
|
|
dp0 t |
p1 |
t p0 t |
|
|||
|
|
dt |
|
|
(6.210) |
|||
|
|
|
|
|
. |
|||
Рассуждая аналогично для состояния S1, получим |
|
|||||||
|
dp1 t |
p0 t |
p1 t . |
(6.211) |
||||
|
dt |
|
||||||
|
|
|
|
|
|
|||
Уравнения (6.210) и (6.211) образуют систему диффе- |
||||||||
ренциальных уравнений для вероятностей состояний (уравнения Колмогорова)34.
33Уравнение (6.209) называется нормировочным условием.
34Названы по фамилии русского математика А.Н. Колмогорова, разработавшего в начале 40-х годов 20 столетия основы общей теории марковских процессов.