

Чтобы найти скорость точки К, необходимо на векторе B12C построить ∆вкс и сходственно с ним расположенное
Vк=(РK)×µV.
Это свойство плана скоростей носит название теоремы подобия скоростей.
2.1.6.Свойство планов скоростей
1.План скоростей – это плоский пучок лучей, исходящих из полюса. Каждый луч представляет собой вектор абсолютной скорости какой-то точки механизма.
2.Отрезки, соединяющие концы векторов, являются относительными скоростями.
3.Свойство подобия: фигуры, образованные на полюсе векторами скоростей, подобны фигурам, образованным звень-
ями механизма, пов рнутыми на 90°.
4. Возможность определения угловой скорости звеньев по величине и направлению:
ω2 = VCB .
CB
План ускорений (рис. 2.6, б):
1)aBn =ω12 AB ;
2)aC = aB + aCB ; aCB = aCBn + aCBτ .
Ускорение точки звена, совершающего сложное движение, складывается из переносного ускорения и относительного нормального и касательного. В данном случае переносное ускорение по характеру поступательное, а относительное вращательное.
aCBn = VCB2 = (cBµV )2 ;
CB CB
a ||CB; |
aτ |
CB. |
CB |
CB |
|
40
Второе уравнение:
aC = aD + aCDn + aCDτ ;
an |
= VCB2 |
= |
(CD µV )2 |
; |
|
||||
CD |
CB |
|
CB |
|
a |
||CD; |
|
aτ CD. |
|
CD |
|
|
CD |
|
Построим план ускорений по приведенным векторным уравнениям, найдем ускорение точки К по аналогичным уравнениям.
Свойства плана ускорений.
1–3. Эти свойства аналогичны свойствам плана скоростей.
4.Угловую скорость второго звена можно определить:
ε2 = aCBτ .
CB
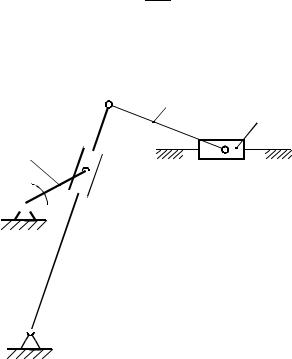
2.1.7.Построение плана скоростей и ускорений кулисного механизма (рис. 2.7)
D |
4 |
|
|
5 |
|
|
E |
1  2
2
 B
B
А
 ω1
ω1
 3
3
C
Рис. 2.7 41
Дано: ω1 = const, размеры звеньев.
Определить скорости и ускорения всех точек механизма. Механизм содержит подвижных звеньев n=5; кинематических пар 5-го класса P5=7; степень подвижности W=1, класс
механизма – 2 (рис. 2.8).
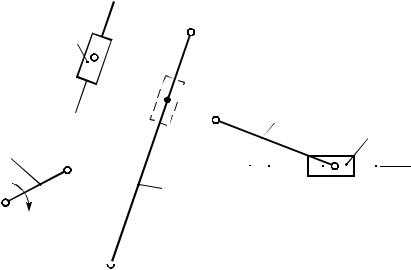
Точка В1 совершает вращательное движение вокруг точки А
VB1=ω1× AB ;
точка В3 совершает вращательное движение вокруг точки С; точка В2 совершает сложное движение – переносное вращательное вместе с точкой В3 и относительное поступательное вдоль звена СД:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VB |
2 |
=VB |
+VB |
B |
; VB |
2 |
=VB . |
|
|
||||||||||||
|
|
|
|
3 |
2 |
3 |
|
|
|
1 |
|
|
|
|||||||||
|
2 |
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B2 |
B3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
5 |
|||||
1 |
B1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А |
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
C
Рис. 2.8. Структура кулисного механизма Построим план скоростей (рис. 2.9).
42

P e
b3  d
d
b12
Рис. 2.9
Скорость точки D находим исходя из свойства подобия:
CD |
= |
Pd3 ; Pd3 = Pb3 CD |
; Vd3 =Vd4 . |
||||||||||
CB |
|
Pb3 |
|
|
|
|
CB |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=VD |
+VE D |
; |
|||||||
|
|
VE |
|
||||||||||
|
|
|
|
|
5 |
|
|
3 |
|
|
5 3 |
||
|
|
VE5 =VE0 +VE5E0 ; . |
|||||||||||
|
|
|
|
|
|
= 0. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
V |
|
|
|
|
|
|
|||||
|
|
E0 |
|
|
|
|
|
|
|
|
|||
Переходим к плану ускорений (рис. 2.10).
e |
π |
b3 |
|
d |
|
b12 |
|
Рис. 2.10
43