

W=6n–5Р5–4Р4–3Р3
Условие существования группы: Wгр. = 0
6n=5Р5+4Р4+3Р3
В этом случае n=2; Р5=1; Р4=1; Р3=1
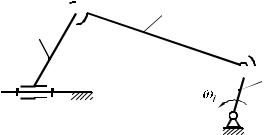
Если такую группу присоединим к начальному звену, движение которого определяет одна обобщенная координата, получим пространственный механизм со степенью свободы, равной единице (рис. 1.27)
 2 3
2 3 
 1
1
n=3;Р5=2; Р4=1; Р3=1; W=6×3–5×2–4×1–3×1=1.
Рис. 1.27
Следовательно, принцип образования пространственных механизмов сохраняется.
2.АНАЛИЗ МЕХАНИЗМОВ
2.1.Кинематический анализ механизмов
Кинематический анализ механизмов – это изучение движения звеньев механизма без учета сил, вызывающих движение. Определяющим фактором здесь является степень свободы механизма. Закон движения ведущих (начальных) звеньев известен, поэтому можно сказать, что кинематический анализ состоит в определении движения звеньев механизма по заданному движению начальных звеньев.
26
Основные задачи кинематического анализа следующие:
1)определение положений звеньев, включая определение траектории движения отдельных точек;
2)определение передаточных функций, скоростей и ус-
корений звеньев механизма.
Методы кинематического анализа:
1)аналитические;
2)графоаналитические;
3)графические;
4)экспериментальные.
В настоящее время аналитические методы анализа выходят на первое место, чему способствует развитие ЭВМ. Однако графоаналитические и графические методы хотя и уступают в точности получаемых результатов, широко распространены изза своей наглядности и доступности.
Ниже рассмотрено аналитическое решение задачи о положениях звеньев механизма по методу преобразования координат. Метод предложен Ю.Ф. Морошкиным.
2.1.1. Определение положений звеньев плоской незамкнутой кинематической цепи
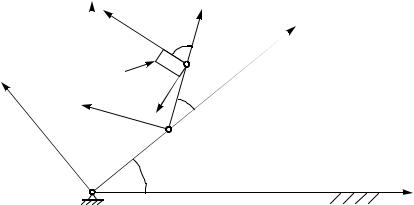
Также кинематические цепи лежат в основе манипуляторов. Рассмотрим четырехзвенную незамкнутую цепь только с вращательными парами 5-го класса, оси кинематических пар параллельны, т.е. цепь плоская (рис. 2.1). Определим степень свободы кинематической цепи.
Необходимо задать три обобщенные координаты, чтобы положение звеньев относительно стойки было определено. В
качестве обобщенных координат примем углы ϕ10, ϕ21, ϕ32. Углы должны быть заданы как функция времени. Заданы размеры звеньев l1 и l2 и положение точки Е3 на звене 3. Положение точки Е3 задано координатами хЕ3 и yЕ3. Требуется найти траекторию точки Е3 относительно стойки.
27
y0 |
x3 |
x2 |
|
|
|
ϕ32 |
x1 |
|
|
O3 |
|
|
E3 |
|
|
|
ϕ21 |
|
|
y |
y2 |
|
|
1 |
|
y3 l2 |
|
|
l1 |
O2 |
|
O1 |
|
ϕ10 |
x0 |
|
|
|
n=3; Р5=3; W=6×3–2×3=3.
Рис. 2.1
Со стойкой свяжем неподвижную систему координат х0, у0. Выберем системы координат х1у1, х2у2 и х3у3, связав их с положением звеньев кинематической цепи.
Положение точки Е3 звена 3 задано в системе координат х3у3 ; необходимо найти ее положение в системе х0у0 , т.е. найти координаты хЕ0 и yЕ0. Переход от системы х3у3 к системе х0у0 проведем постепенно, переходя из третьей системы во вторую, из второй в первую, из первой в нулевую.
Найдем положение точки Е3 в системе х2у2.
x |
E2 |
= |
2 |
+ x |
E3 |
cosϕ |
32 |
− y |
sinϕ |
32 |
; |
|
||||||
|
|
|
|
|
|
|
E3 |
|
|
|
(2.1) |
|||||||
|
|
= x |
|
sinϕ |
|
+ y |
|
cosϕ |
|
. |
|
|
||||||
y |
E2 |
|
32 |
E3 |
32 |
|
|
|
||||||||||
|
|
|
E3 |
|
|
|
|
|
|
|
|
|
|
|||||
Переходим в систему х1у1, находим координаты хЕ1 и yЕ1.
x |
E1 |
= |
1 |
+ x |
E2 |
cosϕ |
21 |
− y |
E2 |
sinϕ |
21 |
; |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
(2.2) |
||||||||
|
|
= x |
|
sinϕ |
|
− y |
|
cosϕ |
|
. |
|
|
|||||||
y |
E1 |
|
21 |
|
21 |
|
|
|
|||||||||||
|
|
|
E2 |
|
|
|
|
E2 |
|
|
|
|
|
|
|||||
Переходим в систему х0у0, находим координаты
Е3=хЕ0,yЕ0.
28

x |
E0 |
= x |
E1 |
cosϕ |
− y |
E1 |
sinϕ |
; |
|
|
|
10 |
|
10 |
|
(2.3) |
|||
|
|
= x |
|
sinϕ |
− y |
|
cosϕ . |
||
y |
E0 |
E1 |
E1 |
|
|||||
|
|
10 |
|
10 |
|
|
|||
Уравнения (2.1), (2.2) и (2.3) являются системой линейных уравнений с шестью неизвестными. Они дают возможность определить траекторию точки Е3 , т.е. определить е положение относительно системы х0у0. Метод преобразования координат более удобен, если воспользоваться матричной формой.
2.1.2. Матричная форма уравнения преобразования координат точек звеньев
Матрица порядка (m×n) есть система чисел (элементов), расположенных в виде прямоугольной таблицы из m строк и n столбцов:
a11,a12 ,........,a1n A= a21,a22 ,........,a2n .
........................
an1,an2 ,........,ann
Если m=n, то матрица называется квадратной порядка n. Уравнения (2.1), (2.2) и (2.3) запишем в матричной фор-
ме. Коэффициенты правой части дают матрицу порядка (2×3). Удобнее использовать матрицы квадратные, поэтому к каждым
двум уравнениям добавим тождество l≡1, получим квадратные матрицы третьего порядка.
Составим матрицу перехода из системы х3у3 в систему
х2у2.
|
cosϕ32 |
− sinϕ32 |
2 |
|
T32 = |
sinϕ32 |
cosϕ32 |
0 |
. |
|
0 |
0 |
1 |
|
Запишем матрицу перехода Т21. 29
|
cosϕ21 |
− sinϕ21 |
1 |
|
||
T21 = |
sinϕ21 |
cosϕ21 |
0 |
. |
||
|
0 |
0 |
1 |
|
||
Матрицу перехода Т10. |
|
|
|
|
||
|
|
cosϕ10 |
−sinϕ10 |
0 |
|
|
|
|
|
|
|||
T10 = |
sinϕ10 |
cosϕ10 |
0 |
. |
|
|
|
0 |
0 |
1 |
|
|
|
Левые части уравнений (2.1), (2.2) и (2.3) с добавлением тождества l≡1 дают столбцевые матрицы третьего порядка:
|
|
|
|
|
xE2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
rE2 |
= |
yE2 |
|
|
|
|
|
; |
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
rE |
|
yE |
|
|
|
|
; |
|
||||||
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xE0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
rE0 |
|
yE0 |
|
|
|
|
|
; |
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xE3 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
rE3 |
|
yE3 |
|
|
|
. |
|
|||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
Радиус-вектор |
rE |
известен, т.к. известны координаты хЕ3 |
||||||||||||||
и yЕ3. |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,rE |
,rE |
|
||||||||||
Чтобы найти значение rE |
2 |
необходимо: |
||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
rE2 =T32 ×rE3 ; |
(2.4) |
|||||||||||||
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|

rE |
|
=T21 |
×rE |
; |
(2.5) |
1 |
|
|
2 |
|
|
rE |
0 |
=T10 |
×rE . |
(2.6) |
|
|
|
|
1 |
|
|
Подставим уравнения (2.4) и (2.5) в уравнение (2.6), подучим
rE0 =T10 ×T21 ×T32 ×rE3 .
Это уравнение позволяет определить положение точке Е3 в системе координат х0у0. Для этого необходимо перемножить
матрицы T10 и Т21, а затем (T10Т21)T32 и столбцевую rE3 .
|
cosϕ10 |
− sinϕ10 |
0 |
|
cosϕ21 |
− sinϕ21 |
1 |
|
|
|
|
||||||
T10T21 = |
sinϕ10 |
cosϕ10 |
0 |
× |
sinϕ21 |
cosϕ21 |
0 |
. |
|
0 |
0 |
1 |
|
0 |
0 |
1 |
|
a11 = cosϕ10 cosϕ21 − sinϕ10 sinϕ21 = cos(ϕ10 +ϕ21 )= cosϕ20; a12 = −cosϕ10 sinϕ21 − sinϕ10 cosϕ21 = −sin(ϕ10 +ϕ21 )= −sinϕ20;
a13 = 1 cosϕ10;
a21 = sinϕ10 cosϕ21 +cosϕ10 sinϕ21 = sinϕ20; a22 = −sinϕ10 sinϕ21 +cosϕ10 cosϕ21 = cosϕ20; a23 = 1 sinϕ10.
|
cosϕ20 |
− sinϕ20 |
1 cosϕ20 |
|
|
|
|
|
|
|
|
||||
T10T21 = |
sinϕ20 |
cosϕ20 |
1 sinϕ20 |
|
|
. |
(2.7) |
|
0 |
0 |
1 |
|
|
|
|
Матрицу (2.7) умножаем на матрицу T32 |
и столбцевую |
||||||
матрицу rE3 :
xE3 rE3 = yE3 .
1
31