

an |
|
=ω |
2 |
|
AB |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
B |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
aB3 |
= aB12 |
|
|
|
|
|
k |
|
|
|
|
τ |
|
|
||||||||||
+ aB12B3 |
|
+ aB12B3 звено3; |
||||||||||||||||||||||
a |
B3 |
= a |
C |
+ an |
|
+ aτ |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
B3C |
|
|
|
B3C |
|
|
|||||||||
ak |
|
B |
= 2ω |
3 |
|
V |
|
B |
; |
|
|
|
|
|
||||||||||
|
|
B |
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|||||
|
|
12 |
3 |
|
|
|
|
|
|
|
|
|
|
|
12 |
|
3 |
|
|
|
|
|
||
an |
|
= |
VB2C |
= |
|
|
(Pb |
|
|
µ |
V |
)2 |
; |
|
||||||||||
|
|
|
3 |
|
|
|
|
|
3 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
B |
|
|
BC |
|
|
|
|
|
|
|
BC |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
τ |
|
|
|
|
||||||
aE = aD + aED |
+ aED |
|
|
|
|
|||||||||||||||||||
a |
|
|
= a |
|
|
+ ak |
|
+ ar |
|
звенья 4,5; |
||||||||||||||
E |
E0 |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
EE0 |
|
|
|
EE0 |
|
|
|
||||||||||
an |
|
= VED2 |
= |
(ed µV )2 |
; |
|
|
|||||||||||||||||
|
|
|
|
|||||||||||||||||||||
|
ED |
|
ED |
|
|
|
|
|
|
|
ED |
|
|
|
|
|
||||||||
ak |
|
= 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
EE0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
an |
|
||ED; |
|
|
|
a |
τ |
|
ED; |
ar |
|| xx. |
|||||||||||||
|
ED |
|
|
|
|
|
|
|
|
|
|
ED |
|
|
|
|
|
|
EE0 |
|
||||
2.1.8. Аналоги скоростей и ускорений
Если степень свободы механизма равна единице, то положение выходного звена однозначно определяется обобщенной координатой или углом поворота входного (ведущего) звена. Запишем для первого и второго механизма (рис. 2.11):
Sn = ∏(ϕ1)(1) ; |
(2.15) |
ϕn = ∏(ϕ1)(2) , |
(2.16) |
где Sn и ϕn – положение выходного звена; Π – функция положения; ϕ1 – положение входного звена.
44
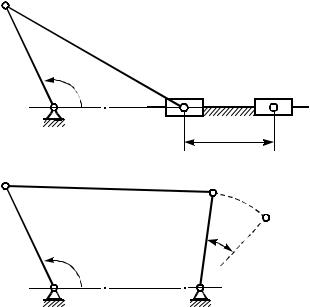
B
W = 1
ϕ1 |
C |
|
A |
||
|
||
|
Sn |
|
B |
а |
|
C |
||
|
ϕn |
|
ϕ1 |
W = 1 |
AD 

б
Рис. 2.11
Чтобы определить линейную и угловую скорости выходных звеньев, достаточно продифференцировать выражения
(2.15) и (2.16) по времени:
|
|
dSn |
|
d∏(ϕ1) |
|
|
d∏(ϕ1) |
|
|
dϕ1 |
|
' |
(ϕ1) ϕ1 ; |
|
|||||
Sn = |
dt |
= |
|
|
= |
|
|
|
|
dt |
=∏ |
(2.17) |
|||||||
dt |
dϕ |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
dϕn |
|
d∏(ϕ1) |
|
|
d∏(ϕ1) |
dϕ1 |
= ∏ |
' |
(ϕ1) ϕ1 . |
|
||||||||
ϕn = |
dt |
|
= |
|
|
= |
|
|
|
|
dt |
|
(2.18) |
||||||
|
|
dt |
|
|
dϕ |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
В выражениях (2.17) и (2.18) структура правых частей одинакова, т.е. линейная или угловая скорость выходного зве-
на определяется угловой скоростью ϕ1 входного звена и функ-
цией ∏'(ϕ1) , которая называется аналогом скорости или первой передаточной функцией. Что это такое аналог скорости?
45