

Долговечность гибкого элемента легко обеспечивается при U < 120 и чрезвычайно трудно при U < 80.
Анализ причин выхода из строя волновых передач показывает, что при U < 120 несущая способность обычно ограничивается стойкостью подшипника генератора волн, при
U ≤ 120 – прочностью гибкого элемента. Максимальный допустимый крутящий момент связан с податливостью звеньев.
8. РАСЧЕТ ПРОСТЕЙШИХ ОСЕСИММЕТРИЧНО НАГРУЖЕННЫХ ТОНКОСТЕННЫХ ОБОЛОЧЕК ВРАЩЕНИЯ
Оболочкой называется тело, ограниченное двумя криволинейными поверхностями, расстояние между которыми – толщина оболочки – мало по сравнению с любыми другими размерами тела. Поверхность, делящая толщину оболочки пополам, называется срединной поверхностью.
Часто тонкостенный сосуд имеет форму тела вращения и представляет собой монолитно соединенные между собой оболочки цилиндрической, конической или сферической формы.
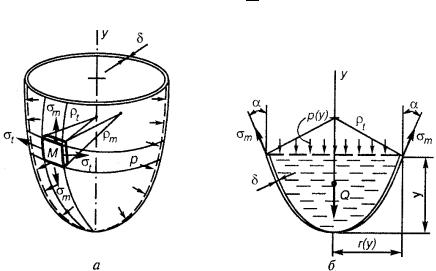
Сосуд находится под воздействием внутреннего гидростатического давления жидкости или газа, направленного по нормали к поверхности оболочки, как правило, симметрично относительно оси вращения y (рис. 8.1, а). Если поверхность оболочки не имеет резких изломов и переходов, а нагрузка осесимметрична, то допускают, что стенки сосуда будут испытывать двухстороннее растяжение с равномерным распределением напряжений по толщине оболочки.
Теория тонкостенных оболочек, в основу которой положено предположение о равномерном распределении нормальных напряжений по толщине стенки, называется безмоментной.
Из условия равновесия элемента оболочки М (рис. 8.1, а) может быть получено уравнение Лапласа, позволяющее определить связь между меридиональным σm и кольцевыми (окружными) σк напряжениями, возникающими в оболочке толщиной δ под воздействием внутреннего давления Р.
120
σm + σк = Р .
ρm ρк δ
Рис. 8.1
В уравнении Лапласа два неизвестных σm и σк , поэтому составляется второе уравнение из условия равновесия части сосуда, отделенного сечением, перпендикулярным меридианам, на уровне рассматриваемой точки (рис. 8.1, б):
∑Fy = 0;
σmδ 2π r( y)cosα − p( y)π r2( y)−Q = 0,
откуда получается уравнение для определения σm :
σ |
m |
= |
p( y)r( y) |
+ |
Q |
, |
|
|
|
2δ cosα |
|
|
2δπr( y)cosα |
|
|
где p(y) – внутреннее давление в сосуде на уровне рассматриваемого сечения; r(y) – радиус окружности кольцевого сечения; α – угол между осью y и касательной к меридиану; Q – вес содержимого в отсеченной части сосуда.
121
8.1. Сферические оболочки
σ
P
σ
Рис. 8.2
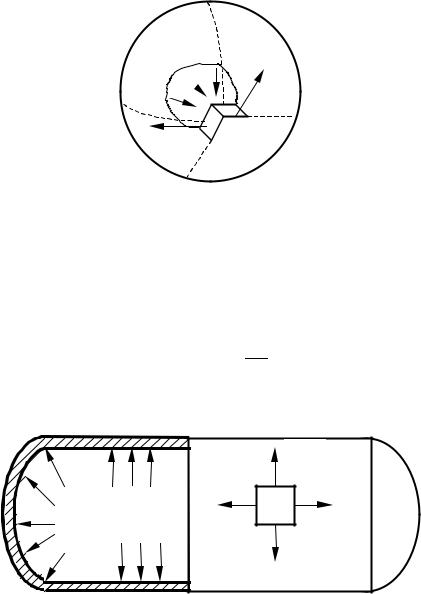
Вследствие центральной симметрии оболочки (рис. 8.2) и нагрузки имеем:
σ |
|
=σ |
|
=σ , |
ρ |
|
= ρ |
|
= d |
, |
|
m |
|
к |
|
|
m |
|
к |
2 |
|
где d – диаметр сферы.
Для этого случая формула Лапласа примет вид
σm =σк =σ = Р4δd .
8.2.Цилиндрические оболочки (рис. 8.3)
|
σk |
σm |
σm |
P |
|
|
σk |
Рис. 8.3 |
|
122 |
|