

12. ШПОНОЧНЫЕ СОЕДИНЕНИЯ
Шпонки применяют преимущественно для передачи крутящего момента от вала к ступице, насажанной на вал детали и наоборот.
Шпоночные соединения разделяют на ненапряженные, осуществляемые призматическими или сегментными шпонками, и напряженные, осуществляемые клиновыми и тангенциальными шпонками.
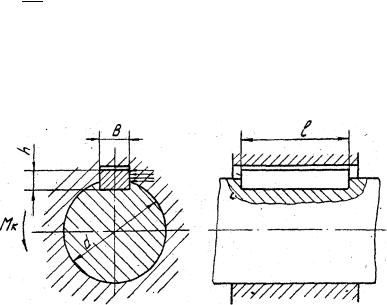
Призматические шпонки (рисунок) выполняют прямоугольного сечения (ГОСТ 23360-78 или СТ СЭВ 189-75). Рабочими у них являются ботовые, более узкие грани. Шпонка удерживается в пазу вала силами трения за счет посадки с на-
тягом Ph99 . Ширину шпонок выбирают равной b = (0,25...6,3)d.
Длину шпонки ℓ принимают в соответствии с длиной ступицы колеса или по расчету из условия прочности на смятие. Принятое значение длины шпонки должно быть согласовано с СТ СЭВ 189-75 ( 14, 16, 18, 20, 22, 25, 28, 36. 40, 45, 50,56, 63, 70, 80, 90, 100, 110. 125, 140, 160, 180, 200).
Рис. 12.1. Схема расчета призматической шпонки
Условие прочности призматической шпонки на срез имеет вид
МК ≤ 0,5 · d · b · ℓ · [τ]ср,
156

где d – номинальный диаметр вала; b – ширина шпонки;
ℓ – длина шпонки; [τ]ср – допускаемое напряжение среза для стальных шпо-
нок принимают равным [τ]ср = 60...90 МПа.
Поскольку размеры сечений шпонок стандартизованы и принимаются в зависимости от диаметра вала d, то их расчет сводится к проверке выбранных размеров по напряжениям смятия:
σсм = d4 Мhк ≤ [σ ]см ,
где h – высота шпонки.
[σ]см – допускаемое напряжение смятия, для стальной шпонки и чугунной ступицы [σ]см = 60...80 МПа; для стальных шпонки и ступицы [σ]см = 120...150 МПа.
Пример 6
Подобрать стандартную призматическую шпонку и проверить е на прочность. Диаметр вала d = 30 мм; момент, передаваемый валом, МК = 240 Н·м. Ступица детали, насаженной на вал, стальная. Допускаемые напряжения при стальных шпонке и ступице
[σ]СМ = 120 МПа.
Решение
По ГОСТ 23360-78 или СТ СЭВ 189-75 в соответствии с заданным диаметром вала d = 30 мм выбираем призматическую шпонку с размерами b = 8 мм; h = 7 мм.
Длину шпонки определяем из условия отсутствия смятия боковых поверхностей в соединении по формуле
|
4 М |
к |
|
4 240 103 |
= |
|
= |
30 7 120 = 38,09 мм, |
|
d h [σ |
] |
|||
|
|
СМ |
|
|
|
|
|
|
157 |