

Проблема заключается в необходимости детального исследования напряженно-деформированного состояния конструкции соединения, обеспечивающей достаточную герметичность стыка. Использование аналитических методов не представляется возможным из-за сложности расчетной модели и характера нагружения конструкции.
Проектирование конструкции на современном уровне предусматривает использование численных методов исследования, среди которых наиболее развит метод конечных элементов.
Постановка задачи предусматривает исследование напря- женно-деформированного состояния пространственной линейноупругой конструкции разъемного соединения секций трубопровода, статически нагруженной силами внешнего атмосферного давления, силами от давления транспортируемого продукта и силами, возникающими от затяжки болтов фланцевого соединения.
При построении конечно-элементной модели использованы объемные элементы в форме призмы с треугольным основанием, пластинчатые элементы треугольной и четырехугольной формы с узлами в вершинах. Узел объемного элемента имеет 3 степени свободы: линейные перемещения вдоль осей глобальной системы координат. Каждый узел пластинчатого элемента имеет 3 линейные степени свободы вдоль трех осей локальной системы отсчета и трех угловых степеней, соответствующих поворотам вокруг этих осей. Пластинчатый элемент испытывает суперпозицию плоского напряженного состояния и изгиба.
4.2.1. Конечные элементы, используемые для моделирования конструкции разъемного соединения трубопровода
4.2.1.1. Объемный элемент в форме прямой треугольной призмы (пентаэдр)
Рассматриваемый элемент (рис. 4.5) представляет собой
прямую треугольную призму.
Целесообразность применения такого рода элементов связана с тем, что:
83
•многие детали имеют призматическую (цилиндрическую) форму или частично состоят из призматических подобластей;
•при аппроксимации пентаэдрами подобных трехмерных областей существенно упрощается проблема автоматизи-
рованной подготовки данных, возникающая, в частности, в
случае использования тетраэдров.
а |
б |
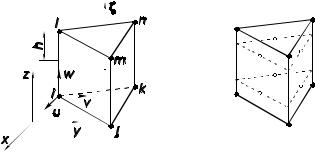
Рис. 4.5. Объемный элемент в форме прямой треугольной призмы:
а– геометрия, узлы и узловые перемещения;
б– расположение точек численного интегрирования
Простейший, первого порядка, пентаэдр (рис. 4.5) имеет узлы i, j, k, l, m, n,расположенные только в вершинах. Особенностью описываемого пентаэдра является то, что его нижнее и верхнее
основания параллельны плоскости xOy, а боковые ребра – оси z.
Принятый порядок локальной нумерации узлов указан на рис. 4.5: последовательность обхода узлов i, j, kнижнего треугольного основания принимается против хода часовой стрелки, если смотреть со стороны верхнего основания, а узлыl, m, nрасполагаются соответственнонад узлами i, j, k.
Функции форм прямого пентаэдра образуются путем умножения функции, интерполирующей перемещения точек в плоскости треугольного основания, на функцию, интерполирующую по третьей координате. Перемещения точек основания в его плоскости описываются с помощью L-координат, а
84
для третьей координаты z применяется линейная интерполяция с применением функций
f |
|
= |
1 |
(1+ζ ζ ) , |
(4.28) |
|
i |
|
2 |
i |
|
в которых индекс i обозначает номер узла, а безразмерная ко-
ордината ζ = (z − zc )/ h |
отсчитывается от точки C, в данном |
||||||||||||||||
случае – от центра тяжести объема пентаэдра. |
|
||||||||||||||||
В рассматриваемом случае L-координаты имеют вид |
|||||||||||||||||
|
|
|
L |
= |
ai +bix+ ci y |
|
(i =1,2,3), |
(4.29) |
|||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
i |
|
|
|
|
2∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
1 |
x1 |
y1 |
|
a1 = x2 y3 − x3y2 ; |
|
||||||||||
∆ = 1 |
|
|
|
||||||||||||||
|
|
|
|||||||||||||||
|
1 |
x |
2 |
y |
2 |
; |
b |
= y |
2 |
− y |
3 |
; |
|
||||
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||
|
1 |
x |
3 |
y |
3 |
|
c |
= x |
3 |
− x |
2 |
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
и остальные коэффициенты в (4.29) получаются циклической перестановкой индексов.
Функции форм прямого пентаэдра определяются как произведения функций (4.28) и (4.29):
Ni = Li fi (i =1,2,3,4,5,6). |
(4.30) |
Интегрирование, предусмотренное для вычисления компонентов матрицы жесткости, может быть выполнено точно, однако с учетом общего численного характера конечноэлементного моделирования используется более простое и целесообразное в данном случае численное интегрирование. Применяются квадратурные формулы типа Гаусса при расположении точек интегрирования в значениях весовых коэффициентов. Соответственно принятым функциям форм прямого пентаэдра интегрирование выполняется при расположении трех точек в каждом из двух сечений (рис. 4.5).
85