

|
|
|
|
|
|
|
|
|
|
x0C = −ϕ21 2 sinϕ21 cosϕ10 −ϕ10 2 cosϕ21 sinϕ10 − |
|
||||||||
−ϕ21 2 cosϕ21 sinϕ10 cosθ21 |
|
|
|
|
|
|
|||
+θ21 2 sinϕ21 sinϕ10 sinθ21 − |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
sinϕ21 cosϕ10 cosθ21 |
−ϕ10 1 sinϕ10 = |
|
|
|
|
|
|
−ϕ10 2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
= −ϕ21 2(sinϕ21 cosϕ10 + cosϕ21 sinϕ10 cosθ21)− |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||
|
|
|
|
+ |
|
|
+ |
||
|
|
|
|
||||||
−ϕ10 2 |
cosϕ21 sinϕ10 + sinϕ21 cosϕ10 cosθ21 |
2 |
sinϕ10 |
||||||
|
|
|
|
|
|
|
|
||
+θ21 2 |
sinϕ21 sinϕ10 sinθ21; |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
(2.14) |
0 |
= −ϕ21 2 sinϕ21 sinϕ10 +ϕ10 2 cosϕ21 cosϕ10 + |
|
|
||||||
|
|
|
|
|
|
|
|
sinθ21 − |
|
+ϕ21 2 cosϕ21 cosϕ10 cosθ21 |
−θ21 2 sinϕ21 cosϕ10 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−ϕ10 2 |
sinϕ21 sinϕ10 cosθ21 +ϕ10 1 cosϕ10 = |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
= −ϕ21 2(sinϕ21 sinϕ10 −cosϕ21 cosϕ10 cosθ21)− |
|
|
|
||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
+ |
|
|
|
− |
|
|
|
|
|
|||||
|
−ϕ10 2 |
cosϕ21 cosϕ10 − sinϕ21 sinϕ10 cosθ21 |
2 |
cosϕ10 |
|||||
|
|
|
|
|
|
|
|||
|
|
|
sinϕ21 cosϕ10 sinθ21; |
|
|
|
|
|
|
−θ21 2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
0 =ϕ21 2 cosϕ21 sinθ21 +θ21 2 sinϕ21 cosθ21. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
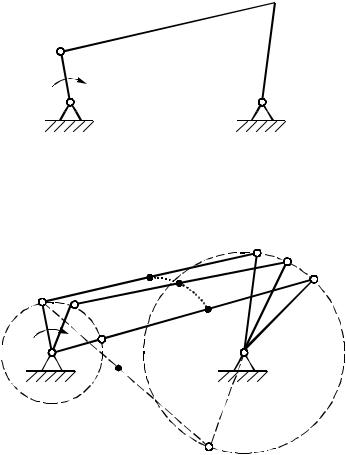
2.1.4. Графическое определение положений звеньев механизма и построение траектории
Для решения поставленной задачи должны быть заданы кинематическая схема механизма и закон движения ведущего (начального) звена.
Для определения положений звеньев механизма кинематическая схема выполняется в масштабе. Для этого выбирается
масштабный коэффициент µl (м/мм), который показывает, сколько метров натуры содержится в одном мм чертежа.
Пусть задана схема механизма 2-го класса (рис. 2.3). Известны размеры звеньев механизма lAB, lBC, lCD, lAD и закон движения ведущего звена. Механизм имеет ведущее звено АВ.
36
2 C
C
B |
3 |
|||
|
||||
1 |
ω1 |
|||
А |
|
|
|
D |
|
|
|
|
|
Рис. 2.3
Построение начинается с определения положения неподвижных точек механизма А и Д (lAD). Затем описываем окружность радиусом lAB и вторую – радиусом lCD (рис. 2.4).
|
|
|
S S1 |
|
C C |
|
|
|
|
|
1 |
C2 |
|||
|
B |
|
B1 |
S2 |
|||
|
|
|
|||||
|
|
|
|
||||
|
ω1 |
|
B2 |
|
|
|
|
|
А |
|
S’ |
|
|
D |
|
|
|
||||||
|
|
||||||
|
|
|
|
|
|
|
|
C’
Рис. 2.4
Выбрав положение звена АВ, определяемое значением обобщенной координаты ϕ1, находим методом засечек положение остальных звеньев ВС и СD.
Точно также можно найти ряд других положений меха-
низма. Будем считать ω1=const, тогда откладывая равные углы от положения кривошипа АВ, найдем положение механизма АВ1С1D и т.д. Затем строим траекторию точки S, лежащей на звене ВС.
37
При построении положений звеньев механизма при одном положении звена АВ звенья ВС и СD могут занимать два положе-
ния ВС и СD или ВС′ и C′D. Это разные механизмы, здесь проявляет себя свойство– условие сборки.
В нашем случае допустим только первый вариант ВСD, т.к. при этом сохраняется требуемое направление угловой скорости звена СD – по часовой стрелке.
Второй вариант – В1С1D – это уже другой механизм, т.к. СD вращается против часовой стрелки.
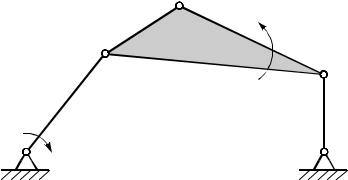
2.1.5.Определение скоростей и ускорений точек звеньев методом планов
Втакой задаче исходными данными являются кинематическая схема механизма (рис. 2.5), закон движения ведущего звена, размеры звеньев механизма.
Дано: ω1=const, размеры lAB, lBC, lCD, lAD, lBK, lKC.
Определить скорость точки К.
Схема механизма выполняется в масштабе.
|
K |
|
ω2 |
B |
C |
|
А |
|
ω1 |
|
D |
|
|
|
||
|
|
|
|
|
W=1
Рис. 2.5
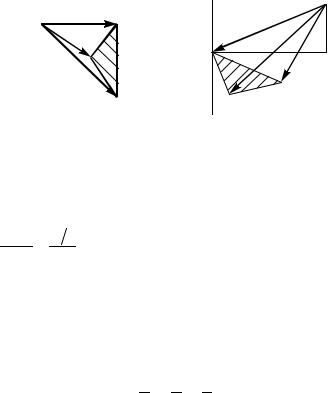
Приступим к построению плана скоростей (рис. 2.6).
38
|
|
|
|
|
|
|
τ |
|
|
|
π |
|
|
|
|
|
P |
|
C |
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
b12 |
|
|
|
|
|
|
|
|
B12 |
n |
K |
|
|
|
|
|
|
|
|
|
а |
|
c |
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Рис. 2.6 |
|
|
|
|
|
|
|
|
|
1. |
Определяем |
скорость |
точки |
В |
ведущего |
звена: |
|||
VB = ω1 AB , VB AB. |
|
|
|
|
|
|
|
|||||
|
|
|
2. Выбрав полюс плана Р, |
откладываем |
в масштабе |
|||||||
µ |
V |
= |
VB |
= |
м с вектор скорости точки В VB (рис. 2.6, а). |
|||||||
|
|
PB |
|
мм |
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
3. Переходим к определению скорости точки С. Точка С принадлежит звену ВС и СD. Звено ВС совершает плоскопараллельное движение. Скорость точки С определяется по теореме сложения скоростей – скорость любой точки звена, совершающего сложное движение, определяется как сумма скоростей в переносном и относительном движении, т.е.
VC =VB +VCB .
VB является переносной скоростью в поступательном
движении, VBC – относительная скорость во вращательном движении точки С вокруг точки В (направлена перпендикулярно к СВ).
Строим на плане это направление: через точку в проводим линию, перпендикулярную к ВС. Из полюса проводим направление скорости точки С при ее движении вокруг D. Точка пересечения двух направлений дает положение точки С на плане. Скорость точки С определяется как
VC=(РС)×µV.
39