


ет их область применения. Изготавливаются конечной ширины от 50 мм до 500 мм, толщиной от 6 мм до 11 мм. Обладают упругостью, хорошо работают при неравномерной и ударной нагрузке. Максимально допустимая скорость V = 30 м/с, предел прочности на разрыв σв = 30 МПа.
Ремни из синтетических материалов в будущем заме-
нят ремни из традиционных материалов благодаря большой прочности и долговечности. Например, полиамидные ремни изготавливают из искусственных нитей, полученных путем холодной протяжки из полиамидной смолы или ленты. Ремни из этого материала пригодны для передач с малым м ежосевым расстоянием и для высокоскоростных передач (V = 70 м/с). Нейлоновый плоский ремень, покрытый каучуковой смесью, показал хорошие результаты работы при V = 100 м/с. Полиамидные ремни бесшумны и имеют ничтожный износ. Двухслойные ремни из нейлона и хромовой кожи обладают очень большой прочностью и эластичностью. Хромовая кожа при работе по металлу имеет высокий коэффициент трения. Такие ремни передают в три раза большую мощность на единицу ширины ремня, чем кожаные или хлопчатобумажные.
9.2.Кинематические и силовые зависимости
9.2.1.Напряжения в ремне
Вразличных по длине частях ремня возникают различные напряжения (рис. 9.6). Для плоского ремня поперечного сечения
F можно определить напряжение от начального натяжения:
σ0 = SF0 = bhS0 .
где F – площадь поперечного сечения,
F = bh,
b – ширина;
h – толщина ремня.
128
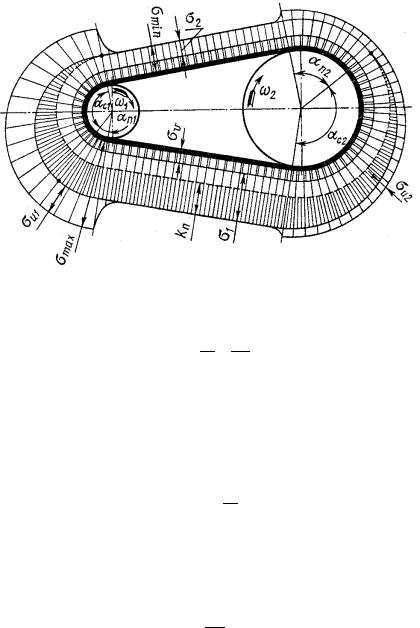
Рис. 9.6. Эпюры напряжений в ремне Напряжение от передаваемого ремн м окружного усилия
σy = FP = bhP .
Напряжение от действия центробежных сил
σc = CF = ρV2 .
Натяжение от изгиба
σu = E Dh ,
где E – приведенный модуль упругости ремня при изгибе. Наибольшие напряжения σmax возникают в ведущей вет-
ви на шкиве меньшего диаметра:
σmax =σ0 + σ2y +σc +σu .
129
9.2.2. Относительное скольжение ремня
Сила натяжение S1 ведущей ветви ремня, сбегающей с ведомого шкива во время работы передачи, больше силы натяжения S2 ведомой ветви, набегающей на ведомыйшкив (рис. 9.7).
На ведущем шкиве сила натяжения постепенно уменьшается, а на ведомом– увеличивается. Деформация приблизительно пропорциональна силе натяжения. На ведущем шкиве ремень укорачивается и проскальзывает по шкиву, а на ведомом удлиняется, что также приводит к проскальзыванию. Таким образом, при работе ременной передачи происходит упругое скольжение ремня на шкивах.
С учетом упругого скольжения окружные скорости ведущего и ведомого шкивов определяются соотношением
V2 =V1 −V1S =V1(1−ξ),
где ξ – коэффициент скольжения ремня, ξ = (n2 − n'2 ) n2 ;
n2 ;
n2 – частота вращения на холостом ходу; n2′ – частота вращения под нагрузкой.
Рис. 9.7. Скольжение в ременной передаче
130

Если пренебречь влиянием веса, то на ременную передачу в состоянии покоя действует сила предварительного напряжения S0. На обеих ветвях усилие S0 одинаково.
Величина начального натяжения может быть определена по формуле
|
|
|
P |
|
fα |
+1 |
|
|
||
S |
0 |
= |
|
e |
|
|
, |
|||
|
|
fα |
|
|
||||||
|
2 |
|
−1 |
|
|
|||||
|
|
e |
|
|
|
|||||
где e – основание натурального логарифма; f – коэффициент трения;
α – угол обхвата на малом шкиве.
Значения efα находятся из соответствующих таблиц. Кроме того, зная σ0 =1,8 МПа, можно также определить S0.
S0 =σ0F =σ0bh .
При холостом ходе и малой скорости передачи усилия на обеих ветвях одинаковы и соответствуют предварительному натяжению:
S1 = S2 = S0 .
Чтобы передать окружное усилие Р, натяжение ветвей должно быть различно на величину Р:
S1 − S2 = P . |
(9.1) |
Увеличение натяжения одной ветви приводит к соответствующему уменьшению натяжения другой, в то время как сумма натяжений сохраняется примерно постоянной:
S1 + S2 ≈ 2S0 . |
(9.2) |
Из совместного решения уравнений (9.1) и (9.2) найдем:
S1 = S0 + P2 ;
131

S2 = S0 − P2 .
Усилие предварительного натяжения (S0) во время работы передачи рассматривается как среднее натяжение ветвей ремня, т.е.
S0 = S1 +2S2 .
Непосредственную связь между натяжением ветвей ремня можно также выразить аналитической зависимостью, установленной Л.Эйлером в 1775 г.
S1 |
= efα = m, |
(9.3) |
|
S2 |
|||
|
|
где e – основание натурального логарифма (e= 2,7182818284). Формула Эйлера выведена для гибкой нерастяжимой и невесомой нити, скользящей по неподвижному цилиндру. Реальная ременная передача отличается от условий, принятых Эйлером. Поэтому формула (9.3) дает лишь приближенную зависимость, и степень приближения зависит от достоверности значений коэффициента трения f, под которым понимается
приведенный коэффициент трения по всей дуге обхвата α (средние значения f находят из таблиц).
Для определения полных усилий S1 и S2 надо учесть центробежное воздействие C, вызывающее в ветвях ремня дополнительно растягивающую силу.
C = ρFV2 , |
(9.4) |
где ρ – плотность материала ремня; V – скорость ремня, м/с;
F – площадь поперечного сечения ремня.
Таким образом, натяжение в ветвях при работе передачи будет равно S1 + C; S2 + C и при холостом ходе S0 + C.
132