

4.2.2. Пластинчатый элемент треугольной формы
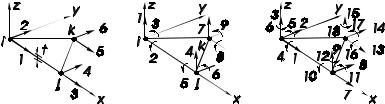
Рассматриваемый элемент (рис. 4.6) применяется для моделирования тонких упругих пластин, находящихся в состоянии суперпозиции изгибного и плоского напряженного (мембранного) состояний. В последнем варианте такого рода элементы эффективно применяются для аппроксимации оболочек как совокупности плоских элементов.
а |
б |
в |
|
Рис. 4.6 Пластинчатый элемент |
|
в форме произвольного треугольника: нумерация узлов и обозначения узловых перемещений в мембранном (а), изгибном (б) состояниях и при их суперпозиции (в)
Узлы элемента i, j, kрасполагаются только в углах и нумеруются против хода часовой стрелки, если смотреть на пластинку с «лицевой» стороны.
Локальная матрица жесткости такого элемента при суперпозиции мембранного и изгибного состояний имеет блочную структуру из подматриц.
Изгибное состояние элемента описывается путем аппроксимации функции прогибов полиномом в L-координатах с де-
вятью неопределенными коэффициентами α1,..., α9, число к о- торых соответствует числу степеней свободы изгибаемого треугольного элемента. С учетом выбранного положительного направления узловых перемещений (рис. 4.6, б) функции формы, соответствующие первому узлу, имеют вид:
86
N |
1 |
= L |
+ L2L |
j |
+ L2L |
− L L2 |
− L L2 |
; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
i |
|
|
i |
|
|
|
|
i k |
|
|
|
i |
j |
|
i |
k |
|
|
|
|
|
|
|
|
|
|
|
||||
N |
|
= −y |
|
|
2 |
|
|
|
+ |
1 |
L L L |
|
+ y |
|
|
|
2 |
|
|
+ |
1 |
L L |
L |
|
(4.31) |
|||||||
|
|
L L |
|
2 |
|
|
L L |
2 |
; |
|||||||||||||||||||||||
|
2 |
|
|
|
ij |
|
i |
|
|
j |
|
|
i |
|
j |
k |
|
|
ki |
|
i |
|
k |
|
i j |
|
k |
|
||||
N |
|
= x |
|
|
2 |
|
|
+ |
1 |
L L |
L |
|
|
|
2 |
|
|
|
+ |
1 |
L L L |
|
|
|
|
|||||||
|
|
L L |
|
2 |
|
− x L L |
|
2 |
|
, |
|
|||||||||||||||||||||
|
3 |
|
ji |
i |
|
j |
|
|
|
i |
j |
|
k |
|
ik |
i |
|
k |
|
|
i j k |
|
|
|
||||||||
где yij = yi – yj; |
yki |
= yk |
– yi; |
xji |
= xj – xi; |
|
xik |
= xi – xk. |
|
|
|
|||||||||||||||||||||
Функции форм для остальных узлов получаются цикли-
ческой перестановкой индексов i→ j→ k.
На основе исходных зависимостей технической теории изгиба тонких упругих пластин для компонентов относительных деформаций
{εЏ}= − |
|
|
|
|
|
T |
|
∂ 2w |
,− |
∂ 2w |
,2 |
∂ 2w |
. |
(4.32) |
|
∂x2 |
∂y2 |
|
|||||
|
|
|
∂x∂y |
|
|||
Матрица жесткости в изгибном состоянии вычисляется с помощью чи сленного интегрирования по формуле, дающей точный результат:
[KИ ]= |
S |
{[B(0.5,0.5,0)]T [DИ ][B(0.5,0.5,0)]+ |
|
|
|
||
3 |
|
|
|
+[B(0,0.5,0.5)]T [DИ ][B(0,0.5,0.5)]+ |
(4.33) |
||
+[B(0.5,0,0.5)]T [DИ ][B(0.5,0,0.5)]}. |
|
||
Матрица упругости [DИ] изгибаемой пластины выражается через матрицу [D] в мембранном состоянии формулой
[D И ]= |
t3 |
[D] . |
(4.34) |
|
|||
12 |
|
|
|
Последовательная нумерация всех узловых перемещений, соответствующих суперпозиции мембранного и изгибного со-
стояний пластинчатого треугольного элемента, принятая в локальной системе координат, приведена на рис. 4.6, в.
87
В глобальной системе принято единое правило знаков –
положительным считается поворот против хода часовой стрелки, если смотреть со стороны положительного «конца» соответствующей оси. Учет правила знаков при преобразовании матрицы из локальной системы в глобальную осуществляется соответствующим заданием направляющих косинусов.
4.2.3. Пластинчатый элемент четырехугольной формы
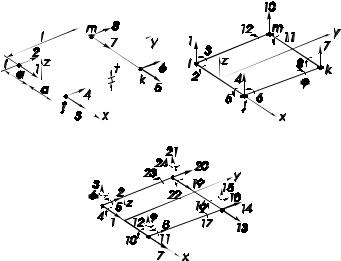
Рассматриваемый элемент (рис. 4.7) строится аналогично треугольному – на основе суперпозиции мембранного и изгибного состояний. Нумерация узлов i, j, k, m осуществляется против хода часовой стрелки, если смотреть на пластину (оболочку) с лицевой стороны.
а |
б |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в
Рис. 4.7 Пластинчатый элемент в форме прямоугольника: нумерация узлов и обозначения узловых перемещений
вмембранном (а), изгибном (б) состояниях
ипри их суперпозиции (в)
Изгибное состояние описывается путем аппроксимации прогибов неполным полиномом четвертой степени с неопреде-
88
ленными коэффициентами α1,…,α12, число которых соответствует числу узловых степеней свободы изгибаемого элемента:
w( x,y)=α1 +α2x+α3 y +α4x2 +α5xy+α6 y2 + |
(4.35) |
+α7x3 +α8x2 y+α9xy2 +α10 y3 +α11x3 y+α12xy3. |
Функции формы изгибаемого прямоугольного элемента, полученные путем нахождения коэффициентов α1,…,α12 и определяющие аппроксимацию (4.35), имеют вид:
N |
|
= |
1 |
|
− |
3x |
|
− |
|
3y2 |
+ |
|
|
xy |
|
|
+ |
|
|
y3 |
|
+ |
3xy2 |
+ |
|
|
x3 |
|
|
− xy3 |
|
− |
xy3 |
; |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
1 |
|
2 |
|
|
4a |
|
|
|
2l2 |
|
|
|
4al |
|
|
|
|
l3 |
|
|
|
|
2al2 |
|
4a3 |
|
al3 |
|
|
4a3l |
|
|
|||||||||||||||||||||||||||
N |
|
= |
|
y |
− |
y2 |
|
− |
|
xy |
|
|
+ |
|
|
y3 |
+ xy2 |
|
− |
|
xy3 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
2 |
|
2 |
|
|
|
l |
|
|
|
|
2a |
|
2l2 |
|
|
|
|
|
|
al |
|
|
|
|
2al2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
N |
|
= |
|
a |
− |
|
ay |
|
− |
|
x |
+ |
xy |
|
− |
x2 |
|
+ |
|
x2y |
+ |
|
x3 |
|
− |
x3y |
; |
|
|
|
|
|
|||||||||||||||||||||||||||
3 |
4 |
|
4l |
|
4 |
4l |
|
4a |
|
4al |
|
4a2 |
|
4a2l |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
N |
|
|
1 |
|
|
|
3x |
|
|
|
3y2 |
|
|
|
xy |
|
|
|
|
y3 |
|
|
|
3xy2 |
|
|
|
x3 |
|
xy3 |
+ |
x3y |
|
|
|||||||||||||||||||||||||
|
= |
|
|
|
+ |
|
|
|
|
|
− |
|
|
|
|
|
|
− |
|
|
|
|
|
+ |
|
|
|
|
|
|
− |
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
; |
|||||||
4 |
2 |
|
4a |
|
|
2l2 |
|
4al |
|
l3 |
|
|
2al2 |
|
4a3 |
a3l |
|
4a3l |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
N |
|
= |
|
y |
− |
|
|
y2 |
+ |
|
xy |
|
|
+ |
|
|
y3 |
− xy2 |
|
+ |
|
xy3 |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
5 |
|
2 |
|
|
|
l |
|
|
|
|
2a |
|
2l2 |
|
|
|
|
|
|
al |
|
|
|
|
2al2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
N |
|
= − |
a |
+ |
ay |
− |
|
x |
|
+ |
|
xy |
+ |
|
x2 |
|
− |
|
x2y |
|
+ |
|
x3 |
|
|
− |
|
x3y |
|
; |
|
|
|
|
|||||||||||||||||||||||||
6 |
4 |
4l |
4 |
|
|
|
4l |
|
4a |
|
4al |
|
4a2 |
|
4a2l |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
N7 = 32yl22 + 4xyal− yl33 + 32xyal22 − xyal33 − 4xa33yl ;
N8 = − 2y2l + 2yl32 − xy2al2 + 2xyal32 ;
N |
|
= − |
ay |
− |
xy |
+ |
x2y |
|
+ |
x3y |
; |
|
9 |
4l |
4l |
4al |
4a2l |
||||||||
|
|
|
|
|
|
|||||||
N10 = 32yl22 − 4xyal− yl33 − 32xyal22 + xyal33 + 4xa33yl ;
N |
= − |
y2 |
+ |
y3 |
+ xy2 |
− |
xy3 |
; |
|
||||||||
11 |
|
2l |
|
2l2 |
2al |
|
2al2 |
|
N12 = ay4l − xy4l − x42aly + 4xa32yl .
89