

Добавил:
mihail1000
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:Учебное пособие 800432.pdf
1.9. Структурные группы пространственных механизмов
Принцип образования механизмов является общим для плоских и пространственных. Условие существования пространственных структурных групп то же, т.е. W=0.
Степень свободы определяется выражением
W=6n-5Р5–4Р4–3Р3–2Р2–Р1.
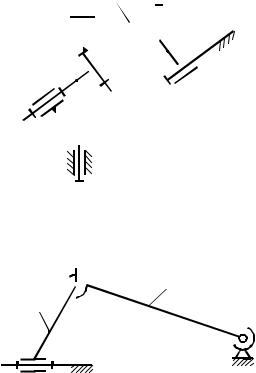
Пусть пространственный механизм состоит из звеньев, соединенных парами только 5-го класса (рис. 1.25). Структурная формула для него имеет вид W=6n-5Р5. Условие существования групп: Wгр. = 0, т.е. 6n=5Р5. Структурная группа будет выглядеть так: n = 5; 5Р5=6n; W=0.
4
3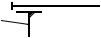




 5 2
5 2



1
Рис. 1.25
Структурная группа получается громоздкой. Выберем другой состав звеньев и пар в механизме (рис. 1.26).
 2 1
2 1 
Рис. 1.26
25