


Трёхмерное моделирование
ЛОКАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ
Основные положения
Единственный трехмерный элемент, который существует с момента создания нового чертежа – это мировая система координат. Она является фундаментом, на котором основываются все дальнейшие построения в трехмерном пространстве. Локальные системы координат строятся относительно мировой системы координат. Локальные системы координат используются для построения трехмерных сборочных моделей и для копирования трехмерных тел.
По способам создания все локальные системы координат можно разделить на две группы.
Первая группа – это системы координат, создаваемые на основе 3D узлов. При этом для задания системы координат достаточно одного узла, определяющего начало системы координат. Если задан второй 3D узел, то он определяет ориентацию оси X. Третий 3D узел определяет ориентацию оси Y.
Вторая группа – это системы координат, создаваемые на основе граней трехмерных тел. По типу поверхности, которой принадлежит грань, такие системы координат делятся на две части:
1. Системы координат, построенные на основе плоской грани. Данный тип задания предполагает в свою очередь свой набор методов, о которых будет идти речь ниже. Перечислим здесь только их названия, отражающие суть метода:
-системы координат по трем плоским граням (одной основной и двум дополнительным);
-системы координат по двум плоским граням и точке;
-системы координат на основе точек и ребер, лежащих на плоскости.
-системы координат, начало которых определяется пересечением плоскости грани и оси цилиндра или тора.
2.Системы координат, построенные на основе оси цилиндра или тора, на котором лежит грань.
Создание локальных систем координат
Для создания локальной системы координат используется команда “3O:Построить систему координат”. Вызов команды:
Клавиатура |
Текстовое меню |
Пиктограмма |
||
|
|
|
|
|
<3О> |
«Построения|Система координат» |
|
|
|
|
|
|
|
|
После вызова команды становится возможным выбор одной из трех опций:
|
<M> |
Выбрать 3D узел как начало координат. |
|
|
|
|
<F> |
Выбрать плоскую грань для задания системы |
|
координат. |
|
|
|
|
|
|
|
164

Локальные системы координат
|
<S> |
Построить систему координат по оси цилиндра |
|
или тора. |
|
|
|
|
|
|
|
Каждая опция, помимо выбора конкретного элемента, определяет способ создания локальной системы координат. Например, если выбрать первую опцию, затем выбрать 3D узел, то будет создаваться система координат на основе 3D узлов.
При вызове команды всегда активизирована опция “Выбрать 3D узел”.
Построение локальной системы координат на основе 3D узлов
Это самый простой способ создания системы координат. В общем случае требуется выбрать три 3D узла, определяющих начальную точку и направление осей. Для создания системы координат достаточно выбора одной начальной точки.
Выбор 3D узла как начало системы координат
Выбор начальной точки осуществляется с помощью опции:
|
|
<M> |
Выбрать 3D |
узел как начало координат. |
|
|
|
|
|
|
|
После выбора первого 3D узла становятся доступными следующие опции |
|||||
|
|
|
|
||
|
|
<Y> |
Завершить ввод. |
||
|
|
|
|
||
|
|
<I> |
Игнорировать выбор последнего элемента. |
||
|
|
|
|
||
|
|
<Z> |
Выбор элемента по имени. |
||
|
|
|
|
|
|
|
|
<M> |
Выбрать 3D |
узел как начало координат. |
|
|
|
|
|
|
|
|
|
<1> |
Выбрать 3D |
узел по направлению оси X. |
|
|
|
|
|
|
|
|
|
<2> |
Выбрать 3D |
узел по направлению оси Y. |
|
|
|
|
|
||
|
|
<A> |
Повернуть систему координат вокруг оси X на 90°. |
||
|
|
|
|
||
|
|
<O> |
Повернуть систему координат вокруг оси Y на 90°. |
||
|
|
|
|
||
|
|
<Z> |
Повернуть систему координат вокруг оси Z на 90°. |
||
|
|
|
|
||
|
|
<Tab> |
Циклический поворот системы координат. |
||
|
|
|
|
||
|
|
<K> |
Отменить выбор 3D узлов, задающих оси X и Y. |
||
|
|
|
|
|
|
После выбора первого 3D узла в 3D окне строится локальная система координат, у которой ориентация осей совпадает с ориентацией осей мировой системы координат (мировую систему координат можно наблюдать в нижнем левом углу 3D сцены).
165
Трёхмерное моделирование
|
Z |
Z' |
|
|
|
|
|
Y' |
|
|
Y |
|
X' |
|
|
X |
|
Если такая ориентация осей вас устраивает, то на этом этапе можно завершить процесс построения |
||
локальной системы координат с помощью опции: |
|
|
<Y> |
Завершить ввод. |
|
Выбор второго 3D узла, определяющего ориентацию оси X, осуществляется с помощью опции |
||
<1> |
Выбрать 3D узел по направлению оси X. |
|
Выбор второго 3D узла позволяет задавать |
ориентацию оси Xлок (оси X локальной системы |
|
координат). Ось Xлок в таком случае направлена из начального 3D узла ко второму 3D узлу. Ось Zлок |
||
определяется как векторное произведение вектора Xлок на вектор Yмир (ось Y мировой системы |
||
координат). |
|
|
Ось Yлок определяется как векторное произведение вектора Zлок на вектор Xлок. |
||
|
Z |
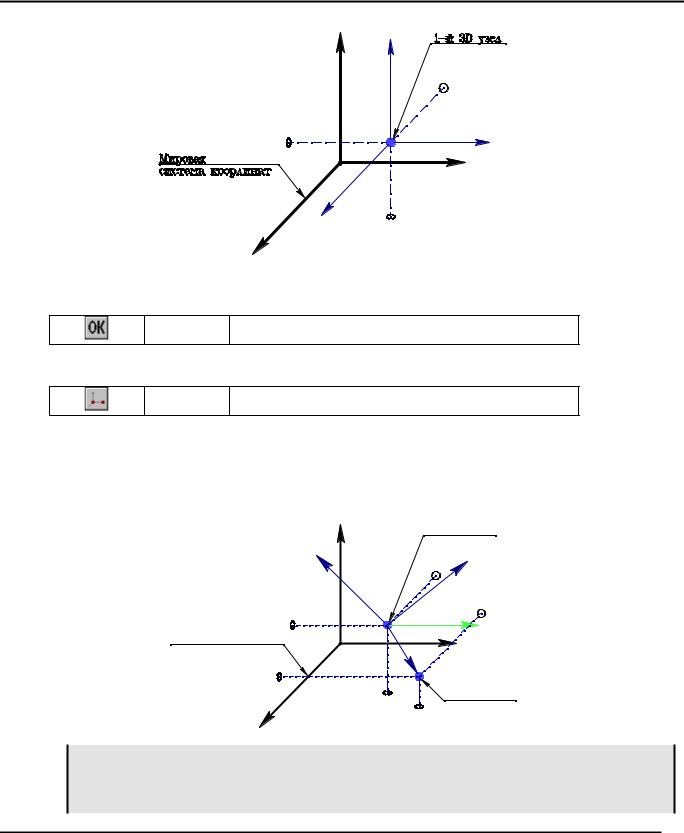
1-й 3D узел |
|
Z'=X'*Y |
Y'=(X'*Y)*X' |
|
|
|
|
|
Y" |
Мировая |
|
Y |
система координат |
X' |
|
|
|
|
|
|
2-й 3D узел |
X
На рисунке оси локальной системы координат помечены индексами с одним штрихом. Вектор Z’, результат произведения X’ * Y, определяется следующим образом. Данный вектор перпендикулярен плоскости, в которой лежат векторы X’ и Y”. Вектор Y” получается при параллельном переносе вектора Y в начальную точку локальной системы
166

Локальные системы координат
координат. Направление вектора Z’ определяется так: из конца этого вектора поворот вектора X’ до вектора Y” будет направлен против часовой стрелки.
Если такая ориентация осей устраивает, то на этом этапе можно завершить процесс построения локальной системы координат.
Выбор третьего 3D узла, определяющего ориентацию оси Y, осуществляется с помощью опции
<2> Выбрать 3D узел по направлению оси Y.
Выбор третьего 3D узла позволяет полностью задать положение системы координат в пространстве. На самом деле третий узел задает не направление оси Y, а положение плоскости, в которой эта ось расположена.
Z |
Z'=X'*Y" |
Y'=Z'*X' |
Y" |
Y |
X' |
X
После выбора третьего 3D узла необходимо завершить процесс построения локальной системы координат с помощью опции
|
<Y> |
Завершить ввод. |
|
|
|
Особенности построения локальной системы координат на основе 3D узлов
Как только выбран первый 3D узел, в 3D окне появляется система координат. По мере задания следующих 3D узлов, эта система занимает соответствующее положение. При построении локальной системы координат возможно возникновение ситуации, когда задаваемые данные не позволяют определить ориентацию осей. Например, такое возможно при совпадении ориентации векторов, задаваемых вторым и третьим 3D узлом, при этом выдается предупреждение в окно диагностики. В этом случае необходимо переопределить выбор узла.
Построение локальной системы координат на основе плоской грани, точек и ребер
Для того чтобы создать локальную систему координат на основе плоской грани, необходимо после вызова команды выбрать опцию
Выбрать плоскую грань для задания системы <F> координат.
167