

II этап. Графическая интерпретация целевой функции
Следующим этапом присвоим целевой функции f значение нуль и построим прямую:
|
f=x1-3x2=0. |
(11) |
Э
(12)![]() и
и
![]() .
Если скалярное произведение векторов
равно нулю, то векторы перпендикулярны.
.
Если скалярное произведение векторов
равно нулю, то векторы перпендикулярны.
Построим вектор
![]() [он проходит через начало координат и
точку (1, -3)] и перпендикулярно ему через
начало координат проведем прямую. Это
и будет прямая (11).
[он проходит через начало координат и
точку (1, -3)] и перпендикулярно ему через
начало координат проведем прямую. Это
и будет прямая (11).
Вектор
![]() всегда показывает направление возрастания
значения целевой функции, а противоположный
ему вектор (-
всегда показывает направление возрастания
значения целевой функции, а противоположный
ему вектор (-![]() )
- направление убывания значения целевой
функции. Передвигая прямую (11) по области
определения параллельно самой себе в
направлении вектора
)
- направление убывания значения целевой
функции. Передвигая прямую (11) по области
определения параллельно самой себе в
направлении вектора
![]() ,
значения целевой функции будут возрастать.
Передвижение в направлении вектора
(-
,
значения целевой функции будут возрастать.
Передвижение в направлении вектора
(-![]() )
дает убывание значения целевой функции.
)
дает убывание значения целевой функции.
Передвижение на графике прямой равносильно изменению значения b в уравнении x1-3x2=b. Каждому значению b соответствует прямая. Получаемые прямые параллельны между собой и называются линиями уровня. Особенность линии уровня состоит в том, что целевая функция принимает на ней одинаковые значения, т.е. подставив координаты любой точки линии уровня в целевую функцию, ее значения изменяться не будут.
Целевая функция f в задаче (8)-(10) достигает своего минимального значения в точке В многоугольника, а максимального - в точке D.
III этап. Нахождение оптимального решения
Оптимальному решению задачи (8)-(10) соответствует точка В, которая лежит на пересечении прямых
|
-x1+x2=3 (II), x1+x2=10 (IV). |
(12) |
Для определения
координат точки В решим систему (12). В
результате получим:
![]() ,
,
![]() ;
;
![]() .
.
Перейдем теперь к рассмотрению свойств решений задачи линейного программирования. Ранее отмечалось, что все допустимые планы задачи линейного программирования образуют так называемую область определения задачи. Примем без доказательства следующую теорему: область определения задачи линейного программирования представляет собой выпуклое множество.

Рис. 2.
Определение 1. Множество называется выпуклым, если ему вместе с двумя произвольными точками принадлежит и прямолинейный отрезок, их соединяющий.
Например, множество планов задачи (8)-(10) является выпуклым. Если взять любые две точки, принадлежащие этому множеству, то и отрезок, соединяющий данные точки, будет также принадлежать этому множеству. Множество, изображенное на рис. 2, не является выпуклым.
Определение 2. Множество называется замкнутым, если ему принадлежат все граничные точки.
Замкнутое множество может быть ограниченным (рис. 3а) и неограниченным (рис. 3б, в). Множество планов задачи линейного программирования представляет собой замкнутый выпуклый многогранник (в двумерном пространстве - замкнутый выпуклый многоугольник). Вершины многогранника (многоугольника) являются его угловыми точками. Прямая, плоскость, полуплоскость, пространство, полупространство угловых точек не имеют.
Теорема (без доказательства). Целевая функция задачи линейного программирования достигает своего экстремального значения в угловой точке многогранника решений. Если целевая функция принимает экстремальное значение более чем в одной угловой точке, то она достигает того же значения в любой точке, лежащей на соединяющем их отрезке.
В двумерном пространстве утверждение второй части теоремы будет иметь место, если прямая f=c1x1+c2x2=0 при передвижении по области определения в необходимом направлении совпадает с одной из граничных прямых области. Такое совпадение возможно только при равенстве угловых коэффициентов данных прямых.

Рис. 3а.

Рис. 3б.
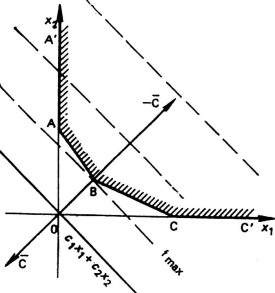
Рис. 3в.
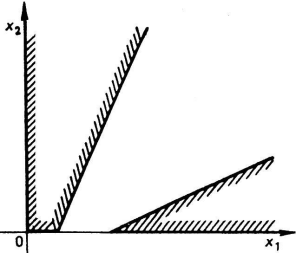
Рис. 3г.
Если целевая функция достигает своего экстремального значения в одной угловой точке, то задача имеет единственное оптимальное решение, если более чем в одной точке - то задача имеет бесконечное число оптимальных решений.
Множество планов задачи линейного программирования может быть:
1) замкнутым ограниченным (рис. 3а) - в этом случае задача обязательно имеет одно или бесконечное число оптимальных решений;
2) замкнутым неограниченным (рис. 3б, в) - в этом случае задача имеет одно или бесконечное число решений, либо вообще не имеет оптимальных решений, когда в силу неограниченности множества значение целевой функции неограничено;
3) пустым (рис. 3г) - в этом случае задача допустимых решений не имеет, так как не существует точек, удовлетворяющих всем ограничениям одновременно.
Кроме того, область определения задачи линейного программирования может быть представлена точкой, отрезком, лучом.
Замечание. Ситуация, когда задача линейного программирования не имеет оптимального решения, возникает, как правило, в искусственно создаваемых задачах. Реальные задачи линейного программирования всегда разрешимы, т.е. должны иметь оптимальный план. Однако иногда некорректная постановка задачи может привести к ее неразрешимости.