

3. Представление решений уравнений Ламе в форме Папковича-Нейбера
Запишем
систему Ламе (общий вид ур-ний
 и
еще + 2 ур.) при х=у=z=0
в виде
и
еще + 2 ур.) при х=у=z=0
в виде




 - Объемное расширение
- Объемное расширение
Положим
 =
= , где
, где - пока неопределенная функция. Система
Ламе имеет вид:
- пока неопределенная функция. Система
Ламе имеет вид:






так
как

или

Общее
решение
 ,
где
,
где - общее решение,
- общее решение, - частное решение
- частное решение
 Получим
решение системы Ламе в ф.
Гродского-Папковича-Нейбера
Получим
решение системы Ламе в ф.
Гродского-Папковича-Нейбера





Билет 36 1. Классификация линейных уравнений в частных производных 2-ого порядка. Примеры уравнений основных типов. Постановка начальных и граничных задач
Опр.1. Уравнением с частными производными называется называется выражение вида :
 (1), где F(~)
– заданная функция,
(1), где F(~)
– заданная функция,
 -
искомая функция. Порядком уравнения
называют наибольший порядок частной
производной, входящей в уравнение (1).
-
искомая функция. Порядком уравнения
называют наибольший порядок частной
производной, входящей в уравнение (1).
Опр.2. Уравнение (1) называется линейным, если функция F линейна относительно искомой функции u и всех ее производных.
Линейное уравнеение 2-го порядка с частными производнымии имеет вид:
 (2), где
(2), где
 ,
, ,c(x)
– коэфф-ты, а f(x)-
правая часть.
,c(x)
– коэфф-ты, а f(x)-
правая часть.
 (3) Переписали (1) для
линейного уравнения 2-го порядка в
частных производных (F
- линейная).
(3) Переписали (1) для
линейного уравнения 2-го порядка в
частных производных (F
- линейная).
Опр.3. Уравнение (3){(1)} называется квазилинейным, если функция F линейна относительно старших производных.
Общий вид квазилинейного уравнения 2-го порядка:
 (
( )
)
Опр.4. Квазилинейное уравнение называется, почтилинейным, если его коэффициенты зависят лишь от независимых переменных.
Почтилинейное
уравнения 2-го порядка:
 (
( )
)
Примеры:
1) ,
, ,
, пространственные переменные,t
– время,
пространственные переменные,t
– время,
 .Это уравнение описывает колебательный
процесс.
.Это уравнение описывает колебательный
процесс.
При n=1 это уравнение колебания струны, а при n=2 – мембраны.
Перепишем (2) в виде (коэффициенты не зависят от х)
 (4) обозначим :
(4) обозначим :
Поставим
в соответствие (4) характеристическую
форму
 (5)
(5)
(5)
с помощью невырожденного линейного
преобразования можно привести к
каноническому виду:
 ,
, (6)
(6)
Это
преобразование не единственно, но всилу
закона энерции квадратичной функции
кол-во
 сохраняется.
сохраняется.
Предположим
что ур-ние (4) с помощью некоторого
невырожденного преобразования можно
привести к виду:
 (7)
(7)
Тогда (7) называется каноническим Видом (4).
Классификация:
Обозначим r
- число
 ,
s
- число
,
s
- число

r+s=n, т.е. все коэф-ты либо 1, либо -1.
1а) либо r=0, либо s=0 (4) называется эллиптическим.
1b) r0, s0 (4) называется гиперболическим, при этом, если r=1, либо s=1 , то (4) называется нормально гиперболическим (струна, мембрана). Иначе (4) называется ультрагиперболическим.
r+s<n
, т.е. есть

(4) называется параболическим (уравнени
теплопроводности).
(4) называется параболическим (уравнени
теплопроводности).
2а) Если r=0 или s=0, то уравнение называется эллиптико-параболическим.
2b) Если r0 или s0, то уравнение называется гиперболо-параболическим.
2. Движение абсолютно твердого тела, имеющего одну неподвижную точку. Кинематические уравнения Эйлера
Т.к. тело имеет одну неподвижную точку , зн.оно имеет 3 степени свободы. Вводим 3 пар-ра – углы Эйлера(они однозначно определяют положение тела)
ОК- линия
узлов -угол
нутации
-угол
нутации -угол
собств.вращения
-угол
собств.вращения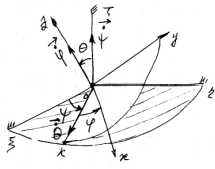
OZ-ось собств.вращен.
 -
ось прецессии
-
ось прецессии
OK- ось нутации
 (проекции
(проекции на оси НСК)
на оси НСК)
3. Базовые принципы мкэ в механике деформируемого твёрдого тела
Математическая модель - сист. диф. ур. описывающих явления, процесс, объект сист.
Физическая модель- совокупность основных свойств и параметров явления, процесса, объекта, системы и описания модели.
Найти решение точно практически не возможно, обычно пользуются приближёнными методами.
Дискретизация- представление объекта, процесса, системы ввиду составных частей (разбиение).
МКЭ - пример физической дискретизации - система разбивается на КЭ и сам КЭ- физический объект.
Объёмные и поверхностные нагрузки по принципу возможных перемещений «состоят»:





Условие: интеграл от направления на возможных деформаций (по принципу возможный перемещений):
 (1)
(1)
 (2)
(2)
 -
закон Гука (3) где
-
закон Гука (3) где ,
,
введём
некую матрицу, включающую дифф. операторы (3а)
подставим (3) в (2) :
(3а)
подставим (3) в (2) : (4) вводят связь для
элемента функции перемещения в виде
(5)
(4) вводят связь для
элемента функции перемещения в виде
(5)
 - непрерывное перемещение в любой точке
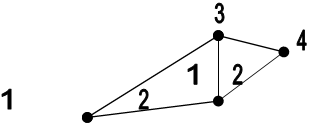
(5) Вектор условных перемещений
выбранных треугольных элементов
- непрерывное перемещение в любой точке
(5) Вектор условных перемещений
выбранных треугольных элементов
 - чем больше узлов тем точнее
- чем больше узлов тем точнее
Функции
формы
 - перемещения по узлам перемещения
в любой точке (6)
- перемещения по узлам перемещения
в любой точке (6) - матрица из координатx,y,zи их степеней.
- матрица из координатx,y,zи их степеней.
 вектор
из коэфф.
вектор
из коэфф.
 соответствующие
узлы
соответствующие
узлы
(6) подставим в (3а) и дифф. (6) по соотношениям (3а)
Получим
связь
 (7) В –
матрица градиентов.Через угловые
перемещения можно найти деформацию
(7) В –
матрица градиентов.Через угловые
перемещения можно найти деформацию
(7) в (4)

 - вектор деформаций
- вектор деформаций
 (8)
(8) - матрица жёсткости элемента
(9)
- матрица жёсткости элемента
(9) (10)
(10) - соотношение для внешних нагрузок
- соотношение для внешних нагрузок
Ур. равновесия
элемента




глобальная
матрица жёсткости

Этапы решения
Дискретизация
Нумерация
Построение матриц и векторов отдельных конечных элементов
Формирование [K] и {F} всей системы
Учёт граничных условий
Решение С.Л.А.У.
Билет 37